 Опубликовано в рубрике
Опубликовано в рубрике 
Изобретение относится к судостроению, преимущественно атомному подводному. Атомная подводная лодка (АПЛ) содержит прочный корпус, охватывающий его легкий корпус, цистерны между этими корпусами и спасательную всплывающую камеру, пристыкованную к АПЛ с возможностью отделения от нее. Прочный корпус выполнен из отдельных жестко связанных между собой капсул с разделением их на капсулы для обитания экипажа и капсулы с энергетическими и другими потенциально опасными установка-ми и системами.
Капсулы прикреплены к общей силовой килевой ферме, а спасательная камера выполнена в виде самоходной и управляемой подводной лодки, в которой размещен главный пункт управления атомной подводной лодкой и которая используется для спасения всего экипажа при аварии атомной подводной лодки. Капсулы сообщены между собой переходными люками с герметичными закрытиями и через соединительный блок и разъемный шлюз — со спасательной камерой для прохода в нее экипажа. Достигается повышение безопасности и бесшумности АПЛ, а также повышение возможности спасения экипажа..
Известна атомная подводная лодка (АПЛ), содержащая прочный корпус, охватывающий его легкий корпус, цистерны между этими корпусами и спасательную камеру, пристыкованную к АПЛ с возможностью отделения от нее (см. Павлов А.С. Военные корабли России 1997 — 1998 г.г. Справочник. Якутск, Литограф, 1997 — 151 с. Стр. 17, 18, 23, 24; Букалов В.М., Нарусбаев А.А. Проектирование атомных подводных лодок. Л., Судостроение, 1968, стр. 72-83).
Существующее расчленение среды обитания в прочном корпусе путем применения «прочных» межотсечных переборок подводной лодки носит иллюзорный характер, сохраняя взаимосвязь отсеков по проходящим через переборки многочисленным трубопроводам газов и жидкостей, воздуховодам вентиляции и кабельным трассам (силовым, управления, связи и др.), что зачастую приводит к невозможности локализации повреждений и пожаров на борту, потере управления отсеками и распространением повреждений в соседние отсеки. Такие ситуации неминуемо оканчиваются катастрофами, см. Букань С.П. По следам подводных катастроф. М.: Гильдия мастеров «Русь» — 1992.
Технические средства управления, связи, жизнеобеспечения, пожаротушения и электроснабжения показали свою несостоятельность из-за слабой инженерной защиты и отсутствия надежного локального (отсечного) резерва этих средств, не рационального по-строения организации при борьбе с авариями, а также опасного непосредственного кон-такта энергоемкого оборудования с экипажем.
Эти результаты ( обеспечение безопасности экипажа) достигаются тем, что в атомной подводной лодке, содержащей прочный корпус, охватывающий его легкий корпус, цистерны между этими корпусами и спасательную камеру, пристыкованную к атомной под-водной лодке, прочный корпус выполнен из отдельных жестко связанных между собой капсул с разделением их на капсулы для обитания экипажа и капсулы с энергетическими и другими потенциально опасными установками и системами, причем капсулы прикреплены к общей силовой килевой ферме, а спасательная камера выполнена в виде самоходной и управляемой подводной лодки, в которой размещен главный пункт управления атомной подводной лодкой и которая используется для спасения всего экипажа при аварии атом-ной подводной лодки, при этом капсулы сообщены между собой переходными люками с герметичными закрытиями и через соединительный блок и разъемный шлюз для прохода в спасательную камеру.
Кроме того, на атомной подводной лодке установлены реакторы, имеющие ответвления первого контура на термоэлектрические генераторы с естественной циркуляцией теплоносителя.
Кроме того, каждая капсула снабжена автономными системами пожаротушения и живучести, а обитаемые капсулы имеют еще и автономные системы жизнеобеспечения и связи.
Помимо повышения безопасности экипажа в капсулах, дистанционированных от капсул с энергетическими и другими опасными установками и системами, значительный функциональный эффект предлагаемой атомной подводной лодки (АПЛ) обеспечивается применением дополнительных термоэлектрических генераторов (ТЭГ), работающих со штатными реакторами ядерной энергетической установки (ЯЭУ) АПЛ см. описание к па-тенту RU 2151083 С1). Это позволяет отказаться от аварийных дизель-генераторов и со-кратить емкость аккумуляторной батареи (резервной). Мощность ТЭГ ориентировочно на два порядка ниже, чем штатного турбогенератора, и выбирается из условий обеспечения бесшумного плавания АПЛ на малых ходах (3-7 узлов) в подводном рейсе с одновременным экономным снабжением электроэнергией основных бортовых систем управления, жизнеобеспечения, живучести и связи АПЛ, в том числе при ремонтах и/или авариях на борту без ограничения по времени пребывания в подводном положении.
Реальность предложения подтверждается достигнутыми в настоящее время показателями надежности и возможностями дистанционного управления сложных технических систем из удаленного центра с перенесением функций активной безопасности, саморегуляции и автоматического дублирования на локальные необслуживаемые компьютерные устройства уже давно успешно используемые, например, в наземной ядерной энергетике и в технике пилотируемых космических полетов, авиации (см., например, Отраслевой семи-нар Минатома «Современные методы и средства диагностики ЯЭУ. Обнинск, 2001, 98 с., а так же опытом создания и эксплуатации автоматизированной АПЛ проекта 705, разрабо-танной СКБ-142, см. Ильин В.Е. Подводные лодки России. М.: Астраль, 2002 — 287с., стр. 62-71).
Предлагаемые капсулирование и дистанционное управление саморегулирующимися установками АПЛ из главного пункта управления (ГПУ), размещенного в спасательной камере, позволяют резко сократить численность экипажа АПЛ, оставляя за специалистами только контроль по основным служебным постам. При трехсменной вахте получается 15 человек на борту.
Ряд вспомогательных функций, таких как питание, уборка помещений, медицина, организация досуга и др., будет обеспечиваться подвахтенной сменой. Реальность такого расширения функций подтверждается практикой длительных (более 1 года!) космических пилотируемых полетов. С набором опыта плавания в подобных условиях, можно ожидать дальнейшую интеграцию функций членов экипажа и снижение их численности.
Известна американская атомная подводная лодка «Тритон» (SSRN-586), имеющая кормовую оконечность (КО), содержащую прочный корпус, гребные валы с гребными винта-ми, а также главные упорные подшипники и дейдвуды в кормовом отсеке. (Быховский И.А. Атомные суда. Ленинград, 1961 г., стр. 121-128, 144, табл. 13/3-я строка сверху).
Недостатком этой АПЛ является то, что ее КО не приспособлена для размещения в ней дополнительного оборудования контроля и защиты кормовой полусферы как из-за отсутствия необходимой площади для размещения, так и невозможности обеспечить условия для работы аппаратуры обнаружения.
Известна также российская дизельная ПЛ проекта 877 (Класс «Kilo» -«Варшавянка») (см. Справочник «Военные корабли СССР и России», г. Якутск, изд. 1995 г., стр. 44), имеющая КО с кормовым отсеком, через которые насквозь проходит линия вала, а греб-ной винт расположен кормовее по отношению к кормовым рулям — прототип.
Недостатком КО данной ПЛ является конструктивная неприспособленность для размещения в ней дополнительных акустических и неакустических средств контроля за наиболее уязвимой кормовой полусферой пространства за ПЛ, систем подводной радиосвязи с выпускаемой антенной и средств активной и пассивной защиты от телеуправляемого и самонаводящегося оружия противника.
Технической сущностью настоящего изобретения является обеспечение защиты кор-мовой оконечности подводной лодки как наиболее уязвимой ее части.
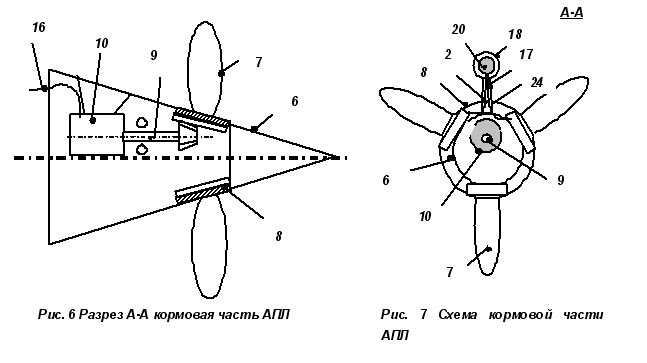
Это достигается тем, что в КО, содержащей прочный и легкий корпуса, гребной винт и вал, гребной электродвигатель, главный упорный и опорный подшипники, дейдвуд и кормовые рули с приводами, гребной винт подвижно насажен на прочный корпус, например в районе кормового отсека, и имеет ступицу большого диаметра, по контуру совпадающую с образующей линией легкого корпуса ПЛ в месте установки ГВ. При этом для размещения ГВ легкий корпус ПЛ имеет разрыв, а упор винта передается на корпусные конструк-ции прочного корпуса непосредственно от ГВ через кольцевые поверхности на ступице винта и прочном корпусе (находящиеся в плоскости шпангоута), снабженные антифрикционным покрытием, а смазка и охлаждение трущихся поверхностей обеспечивается самопротоком окружающей забортной воды.
Количество лопастей данного ГВ в связи с резким увеличением диаметра ступицы увеличивается в несколько раз по сравнению с ГВ традиционной конструкции, а их высота снижена из расчета создания требуемого упора ГВ при существенно сниженной частоте вращения до супернизких оборотов.
Привод ГВ осуществляется, например, несколькими радиально установленными электродвигателями, на выходном валу каждого из которых имеются шестерни, вступающие в зацепление с зубчатым колесом большого диаметра, являющимся частью конструкции ступицы ГВ.
Атомная подводная лодка АПЛ (рис. 1…11) содержит содержащей прочный корпус 1, охватывающий его легкий корпус 2, цистерны 3 между этими корпусами 1 и 2, прочную рубку 4 и спасательную всплывающую камеру 5 , установленную внутри прочного корпуса 1 под прочной рубкой 4 , кормовую оконечность 6 с гребным винтом 7 со ступицей 8, установленной на гребном валу 8, соединенном с электродвигателем 10 и, по меньшей мере, один ядерный реактор 11, соединенный трубопроводами контура циркуляции 12 с турбогенератором 13, который электрическим кабелем 14 соединен с аккумуляторами 15, которые электрическим кабелем 16 соединен с электродвигателем 10. При этом к прочному корпусу 1 прикреплена обтекаемым пилоном 17, по меньшей мере, одна герметичная мотогондола 18 обтекаемой формы с быстросбрасывамой торцовой заглушкой 19 и с жидкостным ракетным двигателем морского исполнения 20. Внутри прочного корпуса 1 могут быть установлены баки окислителя 21 и горючего 22, соединенные трубопроводами окислителя 23 и горючего 24 с каждым жидкостным ракетным двигателем морского исполнения 20. Внутри прочного корпуса 1 могут быть установлены термоэлектрические генераторы 25, соединенные трубопроводами контура циркуляции 26 с ядерным реактором 11.
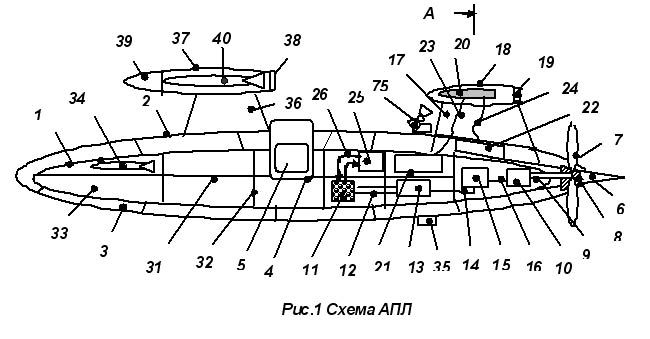
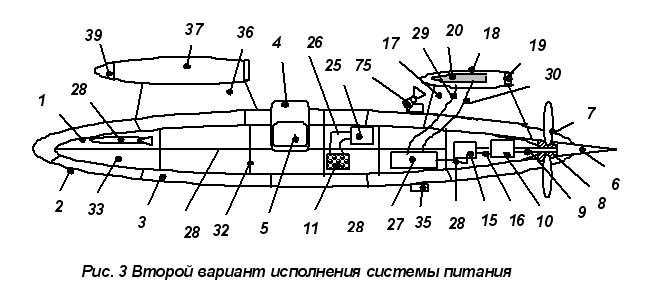
Возможен вариант исполнения АПЛ в котором внутри прочного корпуса 1 установлен катализатор водорода и кислорода 27, соединенный кабелем 28 с аккумуляторами 15. Катализатор водорода и кислорода 27 трубопроводами 29 и 30 соединен с ЖРД 20.
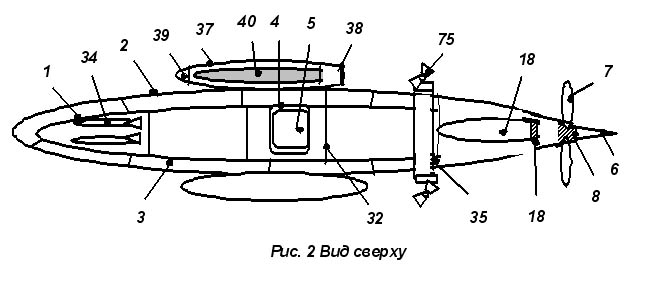
АПЛ содержит палубы 31, переборки 23, разделяющие внутреннюю полость прочного корпуса 1 на отсеки 33. В одном или двух отсеках 33 установлены торпеды 34.На легком корпусе установлен силовой пояс 35 для крепления сопел крена.
АПЛ может иметь установленные на пилонах 36 контейнеры 37 с быстросбрасываемой заглушкой 38 и быстросбрасываемым обтекателем 39 9например при помощи пироболтов). Внутри контейнера 37 установлены ракеты 40.
Жидкостный ракетный двигатель морского исполнения (рис. 8…11), содержит силовую раму 41, камеру сгорания 42, выполненную с возможностью качания в двух плоскостях, газогенератор 43 и турбонасосный агрегат 44, подстыкованный к газогенератору 43 посредством газовода 45, содержащий в свою очередь, турбину 46, насос окислителя 47, насос горючего 48. Турбонасосный агрегат 44 может содержать дополнительный насос горючего 49.
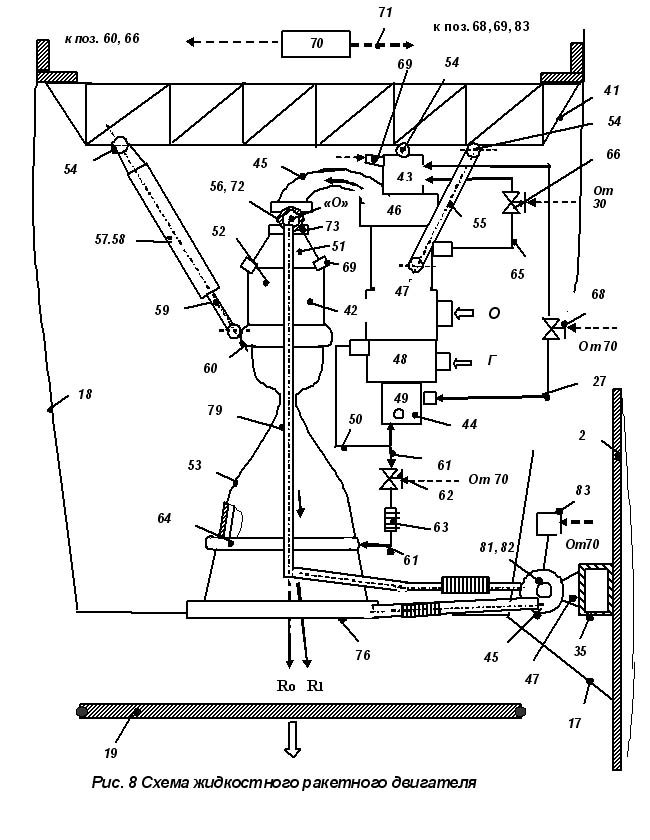
Выход из насоса горючего 48 соединен трубопроводом 50 с входом в дополнительный насос горючего 49 (при его наличии). Камера сгорания 42 содержит головку 51, цилиндрическую часть 52 и сопло 53. Газогенератор 43 закреплен на силовой раме 41 при помощи шарнира 54, а ТНА 44 при помощи двух шарнирных тяг 55. Между газоводом 45 и камерой сгорания 42, точнее ее головкой 61 установлен узел подвески 56 камеры сгорания 42. Он обеспечивает качание камеры сгорания 42 в двух плоскостях относительно точки «О», для управления вектором тяги R.
Для этого жидкостно-ракетный двигатель морского исполнения содержит два при-вода 57, установленных во взаимно-перпендикулярных плоскостях камеры сгорания 42, выполненных, например, в виде гидроцилиндров 58, прикрепленных шарнирами 59 к силовой раме 41, и имеющих штоки 59. На камере сгорания 42, например, на ее цилиндрической части 52, выполнено основное силовое кольцо 60, к которому шарнирно прикреплены штоки 58 приводов 57. Приводы 57 служат для управления АПЛ по углам тангажа и рыскания.
Возможная пневмогидравлическая схема ЖРД приведена на рис. 8 и содержит трубопровод горючего 61, подсоединенный одним концом к выходу из насоса горючего 48, содержащим пускоотсечной клапан 62 и сильфон 63, выход этого трубопровода соединен с главным коллектором 64 камеры сгорания 42. Выход из насоса окислителя 47 трубопроводом окислителя 65, содержащим пускоотсечной клапан окислителя 46 соединен с газогенератором 43. Также выход из дополнительного насоса горючего 49 трубопроводом го-рючего 67, содержащим пускоотсечной клапан горючего 68 соединен с газогенератором 43. На газогенераторе 43 и на камере сгорания 42 установлены, по меньшей мере, по од-ному запальному устройству 69.
Двигатель оборудован блоком управления 70, который электрическими связями 71 соединен с запальными устройствами 69 и с пускоотсечными клапанами 62, 66 и 68.
Особенностью двигателя (фиг. 1 и 2) является то, что ТНА 44 жестко закреплен на силовой раме 41 при помощи не мене, чем трех шарнирных тяг 55, а камера сгорания 42 имеет возможность поворачиваться относительно точки «О».
Узел подвески 66 камеры сгорания 42 ЖРД содержит две части: неподвижную 72 и подвижную 73. Неподвижную часть 72 жестко соединена с газоводом 45, а подвижная часть 73 жестко соединена с головкой 51 камеры сгорания 42, за счет того, что обе части образуют сферическое шарнирное соединение 74, выполненное пустотелым внутри при этом неподвижная часть 72.
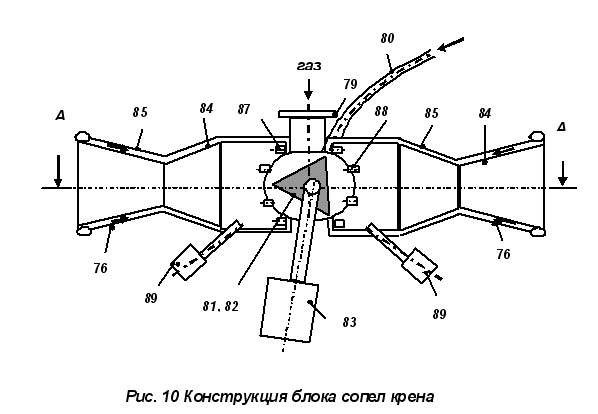
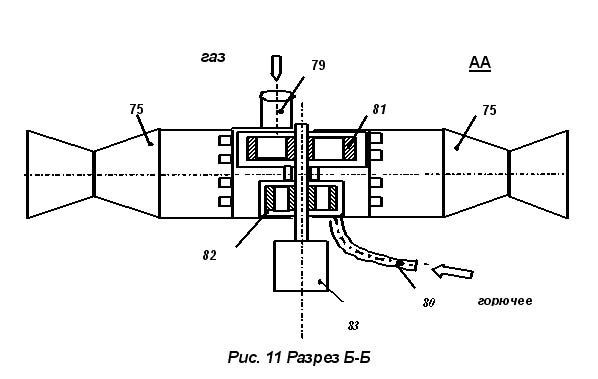
Система управления по углу крена (рис. 9 и 11) содержит один блок сопел крена 75, содержащий по два сопла крена 76. Блоки сопел крена 75 установленны на силовом кольце 35.
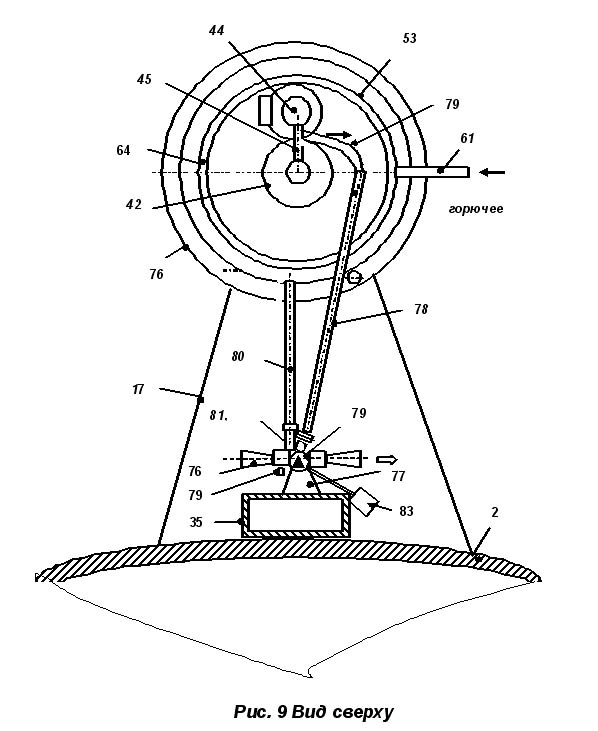
Силовое кольцо 35 установлено и закреплено на легком корпусе 2 (рис. 2). Это силовое кольцо 35 служит для передачи крутящего момента от сопел крена 76 на легкий корпус 2, для этого каждый блок сопел крена 75 присоединен к силовому кольцу 35 при помощи кронштейнов 77. К соплам крена 76 подведены трубопроводы подачи газогенераторного газа 78, другие концы которого соединен с трубопроводом отбора газа 79 и далее – с газоводом 45. В блоке 75 сопел крена 76 между ними установлены трехходовой кран газа 80, который трубопроводом отбора газа 79 соединен с трубопроводом подачи газогенераторного газа 78, и трехходовой кран горючего 41, к которому подсоединен трубопровод горючего 82, идущий от главного коллектора 64. На трехходовых кранах 80 и 81 установлен общий привод 83 на каждом блоке. Таким образом, каждые два сопла крена 76, трехходовые краны 80 и 81 и привод 83 образуют один узел: блок сопел крена 75. Сопла крена 76 (рис. 10 и 11) выполнены с двумя стенками 84 и 85 и коллекторами 86, для про-хода охлаждающего горючего. В каждом сопле крена 85 установлены форсунки горючего 87, окислителя 88 и запальное устройство 89).
АПЛ первого варианта исполнения работает следующим образом (рис. 1, 2 и 4). Запускают ядерный реактор 13 и теплоноситель по трубопроводам циркуляции 12 подается в турбогенератор 13. Турбогенератор 13 вырабатывает электрический ток, который по электрическому кабелю 14 подается в аккумулятор 15, из которого по электрическому ка-белю 16 подается в электродвигатель 10. Электродвигатель 10 через гребной вал 9 приводит во вращение ступицу 8 с гребными винтами 7. Подводная лодка движется в подвод-ном положении. Одновременно часть теплоносителя по трубопроводам циркуляции 25 поступает в термоэлектрические генераторы 25, которые дополнительно вырабатывают электрическую энергию, например в режиме «полета» АПЛ или при отказе турбогенератора 13.
Для значительного ускорения движения АПЛ в режиме атаки она переводится в надводное положение. Потом запускают ЖРД морского применения 10. ЖРД морского применения 10 запускается следующим образом.
В исходном положении все клапаны двигателя закрыты. При запуске ЖРД на горючем с блока управления 80 по электрическим каналам связи 81 подается команда на ракетный клапаны окислителя и горючего (ракетные клапаны на рис. 1 не показаны). После заливки насосов окислителя 47 и горючего 48 открывают пускоотсечные клапаны 62, 66 и 5556, установленные за насосом окислителя 47, после насоса горючего 48 и после дополнительного насоса горючего 49. Окислитель и горючее поступают в газогенератор 43, где воспламеняются при помощи запальника 69. Газогенераторный газ и горючее подается в камеру сгорания 42. Горючее охлаждает камеру сгорания 42, проходя через зазор, между оболочками ее сопла 53 и цилиндрической части 52, образующими регенеративный тракт охлаждения (фиг. 1), выходит во внутреннюю полость камеры сгорания 42 для дожигания газогенераторного газа, идущего из газогенератора 43. Воспламенение этих компонентов осуществляется также запальным устройством 69, установленным на камере сгорания 42.
После запуска турбонасосного агрегата 44 газогенераторный газ подается из газогенератора 43 в турбину 46, раскручивается ротор ТНА (на рис. 8…11 не показано), давление на выходах насосов 47, 48 и 49 возрастает. Далее по газоводу 45 и через узел под-вески 56 газогенераторный газ подается в головку 51 камеры сгорания 42. Часть газогенераторного газа отбирается по трубопроводу отбора газа 79 и далее по трубопроводам 78 и через трехходовые краны поступает в блоки сопел крена 85.
Для управления вектором тяги R при помощи привода 57 воздействуя штоком 58 на силовое кольцо 60 поворачивают камеру сгорания 42 относительно точки «О» на угол 5…70. При этом направление вектора тяги R1 отклоняется относительно первоначального положения R1 продольной оси симметрии камеры сгорания 42 и относительно атомной подводной лодки, на которой этот двигатель установлен.
Для управления атомной подводной лодки, на которой установлен жидкостный ра-кетный двигатель 20, подают команду с блока управления 70 на приводы 83 при этом включается по одному соплу крена 75 из каждой пары и их реактивная тяга создает кру-тящий момент, который через нижнее силовое кольцо 76 и через четыре наклонные тяги 77 передается сначала на сопло 53, потом -на силовую раму 41 и далее на прочный корпус 1 атомной подводной лодки.
Работа АПЛ второго варианта в режиме полета осуществляется следующим обра-зом (рис. 3 и 5). Включают катализатор водорода и кислорода 27, который начинает разлагать воду на кислород и водород. Кислород и водород по трубопроводам 29 и 30 подается в ЖРД морского применения 20. Преимущество этого варианта – отсутствие баков окислителя и горючего и необходимости постоянно транспортировать большой запас этих компонентов ракетного топлива в подводном режиме работы.
АПЛ атакует цели в надводном положении в движении АПЛ в режиме «ракеты», со скоростью М=0,5…1,0, что делает ее неуязвимой и позволяет выпустить торпеды 34 и ракеты 40 из надводного положения. Учитывая, что торпеды 34 уже имеют начальную скорость М=0,5…1,0, уклониться от торпедной атаки невозможно. Ракеты 40 могут применяться не только для решения оперативно- тактических задач, но и для решения стратегических задач, т е. стрельбы из нейтральных вод на расстояние 3000…5000 км. При этом АПЛ остается неуязвимой и если ее местонахождение будет обнаружено, то из-за большой скорости АПЛ в надводном положении и небольшого отрезка времени пребывания в надводном положении от 10 до 60 сек, она не может быть поражена. После выпуска тор-пед 34 и ракет 20 АПЛ уходит в подводное положение. Возможна повторная атака.
Применение изобретения позволило:
1. Обеспечить кратковременное значительное увеличение скорости движения АПЛ в над-водном положение и даже ее полет со скоростью М = 0,5..1,0 в режим атаки для запуска торпед и ракет в надводном положении для обеспечения надежности запуска и точности попадания при неуязвимости АПЛ для средств обороны противника.
2. Обеспечить надежное управление вектором тяги ЖРД и управление атомной подводной лодки по углу крену (по ракетной терминологии) за счет применения двух блоков сопел крена, содержащих по два оппозитно установленных сопла крена и их рационального крепления на двигателе на кольцевом коллекторе и применения четырех наклонных тяг, обеспечивающих передачу вращающего момента на сопло двигателя и далее — на силовую раму при минимальном весе элементов конструкции, передающих момент вращения.
3. Значительно повысить надежность работы системы управления ракетой по крену за счет применения двух трехходовых кранов: газа и горючего и общего привода для них. Такая конструкция предотвращает невключение одного из сопел крена, например, вследствие отказа пускоотсечного клапана горючего.
Авторы статьи:
Патентный поверенный РФ Болотин Николай Борисович
Нефедова Елена
Болотина Марина


