 Опубликовано в рубрике
Опубликовано в рубрике 
Изобретение относится к железнодорожному транспорту.
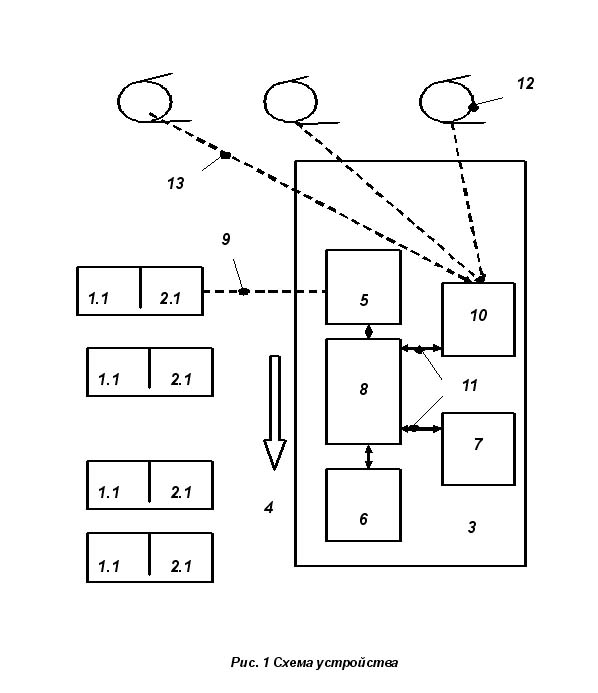
На чертеже представлена структурная схема системы, которая позволяет осуществлять способ определения местоположения вагона-путеизмерителя на железнодорожном пути с помощью путевых устройств, а в таблице приведены примеры вычисления значений функции взаимной корреляции двоичной кодовой последовательности пути и двоичной кодовой последовательности местоположения (см. ниже) и поиска экстремума этой функции.
Система состоит из следующих основных элементов: путевые устройства 1.1, 1.2, 1.k, 1.n, читаемые метки 2.1, 2.2, 2.k, 2.n, вагон-путеизмеритель 3, движущийся в на-правлении стрелки 4, датчик обнаружения путевых устройств 5, пульт управления 6, запоминающее устройство (ЗУ) 7, вычислитель 8 и локальный канал связи 9, приемник глобального дистанционного позиционирования 10, соединенный электрическими связями с вычислителем 8.,. В систему входят три спутника 11,, наиболее близко расположенных к приемнику системы глобального позиционирования 10. СпСвязь спутников 11 и приемника системы глобального позиционирования осуществляется по радиоканалу 12.(см. чертеж)
В системе вдоль железнодорожного пути расположены путевые устройства 1.1, 1.2, 1.k, 1.n, например опоры подвески контактного провода, на которых размещены читаемые метки 2.1, 2.2, 2.k, 2.n. Они (за исключением читаемых меток железнодорожных станций) содержат постоянную информацию, эквивалентную символам «1» или «0» так, чтобы обеспечивалась равновероятность выбора «1» или «0» при их установке на путевые устройства 1.1, 1.2, 1.k, 1.n.
В читаемые метки железнодорожных станций записана семантическая информация идентификации соответствующей железнодорожной станции, в том числе определяющая ее в сети дорог страны (например, наименование, «привязки» к километражу пути и географическим координатам, направление движения и т.д.). Эти читаемые метки выполнены с возможностью программирования и устанавливаются, например, непосредственно за выходным стрелочным переводом соответствующей железнодорожной станции.
Информация идентификации железнодорожных станций упрощает получение необходимых данных, в том числе, по требованиям потребителей и необходима для воспроизведения на пульте управления 6.
Датчик обнаружения путевых устройств 5 выполнен с возможностью считывания информации, записанной на любой из читаемой меток 2.1, 2.2, 2.k, 2.n. Локальный канал связи 9 (например, радиоканал) соединяет датчик обнаружения путевых устройств 5 и читаемую метку, например, 2.1 в тот момент, когда она попадает в поле зрения датчика обнаружения путевых устройств 5, определяемое диаграммами направленности датчика обнаружения путевых устройств 5 и читаемой метки.
Способ определения местоположения на железнодорожном пути вагона-путеизмерителя реализуется системой для его осуществления, представленной на чертеже и в приведенном выше ее описании.
Сперва создают «карту» железнодорожного пути (ниже она обозначена как двоичная кодовая последовательность пути — ДКПП) и запоминают ее в запоминающем устройстве 7.
В этом процессе с помощью движущегося с определенной железнодорожной станции (она является исходным пунктом маршрута — ИПМ) в направлении 4 вагона-путеизмерителя 3 последовательно считывают информацию с читаемых меток 2.1, 2.2, 2.k, 2.n датчиком обнаружения путевых устройств 5 посредством локальных каналов связи 9 как двоичную кодовую последовательность пути (ДКПП) и запоминают ее в запоминающем устройстве 7. Этим методом путевые устройства 1.1, 1.2, 1.k, 1.n, снабженные читаемыми метками 2.1, 2.2, 2.k, 2.n, точно представляют в ДКПП и по наличию, и по месту расположения относительно таковых же.
Информацией о железнодорожных станциях (ее получают от читаемых меток железнодорожных станций) в ДКПП обеспечивают абсолютную «привязку» путевых устройств 1.1, 1.2, 1.k, 1.n к железнодорожному пути.
Локальные ДКПП (полученные по отдельным железным дорогам) «сшивают», при необходимости, в глобальную ДКППРФ страны посредством абсолютной «привязки» путе-вых устройств 1.1, 1.2, 1.k, 1.n к железнодорожному пути.
Аналогично формируют и запоминают в ЗУ 7 двоичную кодовую последовательность местоположения (ДКПМ) в режиме определения местоположения вагона-путеизмерителя 3 на железнодорожном пути в процессе его движения от ИПМ, который реализуют, например, с момента подачи команды исполнения этого режима с пульта управления 6. При этом автоматически запрашивают соответствующую локальную ДКПП с началом от ИПМ (при необходимости используют ДКППРФ) из запоминающего устройства 7 и начинают вычислять функцию взаимной корреляции ДКПП и ДКПМ (ФВК) с помощью вычислителя 8.
ФВК вычисляют как, например, отношение суммы результатов операций «Исключающее ИЛИ» соответствующих символов ДКПМ и ДКПП к числу символов ДКПМ (учитывают только число символов, содержащихся в ДКПМ или ее фрагменте) и находят ее экстремум (пример вычисления значений ФВК и поиска ее экстремума приведен в таблице).
В идеальном случае (соответствующие символы ДКПМ и ДКПП одинаковы) экстремум ФВК равен 1. Такой экстремум ФВК назовем абсолютным экстремумом ФВК.
Абсолютный экстремум ФВК соответствует точному совмещению ДКПМ с ДКПП и, соответственно, точному положению вагона-путеизмерителя 3 относительно путевых уст-ройств 1.1, 1.2, 1.k, 1.n и железнодорожных станций. Поэтому начало ДКПМ (первый момент прохождения соответствующего путевого устройства в поле зрения датчика обнаружения путевых устройств 5) ставят в соответствие началу процесса определения местоположения вагона-путеизмерителя 3 относительно путевого устройства, а конец (последний момент прохождения соответствующего путевого устройства) — текущему положению вагона-путеизмерителя 3 относительно этого путевого устройства.
В случае отсутствия абсолютного экстремума ФВК реализуют его поиск, в процессе которого выявляют и восстанавливают конкретные потерянные символы ДКПМ. Потеря символа ДКПМ означает, что имеется дефект конкретного путевого устройства или его читаемой метки.
Результаты работы способа навигации на железнодорожном пути отображают на пульте управления 6, например, как названия известных сооружений пути, снабженные не-обходимой служебной информацией (например, «12:48.22. 2010.08.08 Пройдена ст.»Асаново» или «06:48.22. 2010.08.18. Неисправность «123 опора подвески КП, 456 км»).
Таким образом, в приведенном примере (см. таблицу) вагон-путеизмеритель 3 начал двигаться до считывания позиции 17 ДКПП (например, «11:48.02. 2010.10.08. Выходная стрелка ст.»Макушино») и находится на железнодорожном пути после прохождения позиции 23 ДКПП (например, «11:49.22. 2010.10.08. 188 опора подвески КП, 98 км»). Поиск экстремума ФВК в общем случае осуществляют для всех возможных положений ДКПМ относительно ДКПП.
Информацию (ДКПП, ДКППРФ) запоминающего устройства 7 при необходимости меняют известными методами (с помощью радиосвязи, мобильного Internet, жестких дисков, компакт — дисков и т.п.).
Читаемые метки могут быть, например, реализованы в технологии RFID (Radio Frequency Identification — радиочастотная идентификация с помощью радиочастотных [читаемых] меток). Появилась тенденция внедрения на железнодорожном транспорте технологии радиочастотных меток (RFID меток), например, для маркировки подвижной железнодорожной единицы (см., например, сайт http://wireless.symmetron.ru/philips.products.shtml). С таких меток обеспечивается автоматическое дистанционное считывание записанной информации с помощью специального радиочастотного считывателя (аналог датчика обнаружения путевых устройств 5). RFID метки дешевы, надежны, миниатюрны, не требуют источника электропитания и могут работать в очень тяжелых условиях эксплуатации (пример тому — программируемые проездные многоразовые билеты в московском метрополитене, оснащенные аналогичными метками). Потенциально RFID метки могут применяться на путевых устройствах для определения местоположения подвижной единицы относительно них.
Периодически или при наличии погрешностей кодовой последовательности проверяют местоположение вагона-путеизмерителя, для этого включают приемник системы глобального дистанционного позиционирования 10 и по радиоканалу 12 принимают сигналы с трех спутников системы 11, по полученным сигналам определяют местоположение вагона-путеизмерителя. Сравнивают результаты, пролученные двумя методами и при наличии рас-хождения корректируютистинное положения вагона-путеизмерителя, по результатам, полу-ченным при помощи системы глобального дистанционного позиционированияЮ, так как последний результат является более надежным и достоверным, потому, что на него не влияют метеоусловия в месте прохождения вагона-путеизмерителя и сбои в электроэнергии, маячков путевых устройств.
Такие метки и технология работы с ними являются предельно простыми (и, следовательно, дешевыми) из-за минимального объема записанной в них постоянной информации и принципиально не требуют специальной «привязки» этой информации к путевым устройствам. Это означает, что еще на этапе изготовления кристаллов читаемых меток (полупроводниковая технология) они могут быть запрограммированы (т.е., они не требуют специальной операции программирования).
Принципиально случайный характер информации, содержащейся в ДКПП, исключает какие-либо сортировки читаемых меток в технологии работы с ними. В этом смысле они поставляются «навалом», т.е. без сортировки по записанной в них информации, и используются путем случайной выборки, например, в процессах простейших операций установки в любой последовательности на путевые устройства (на железнодорожных станциях устанавливаются программируемые читаемые метки).
Несомненно, возможно применение программируемых читаемых меток или их функциональных аналогов, например, для выделения специальных отдельных путевых устройств, дублирования сигналов путевой сигнализации и т.п.
Проведя анализ уровня техники по научно-техническим и патентным источникам При вычислении значения ФВК для данного положения ДКПМ относительно ДКПП определяют отношение числа совпавших символов этих последовательностей к числу символов ДКПМ.
Автор статьи: Патентный поверенный РФ Болотин Николай Борисович


