 Опубликовано в рубрике
Опубликовано в рубрике 
Изобретение относится к судостроению, преимущественно атомному подводному. Атомная подводная лодка (АПЛ) содержит прочный корпус, охватывающий его легкий корпус, цистерны между этими корпусами и спасательную всплывающую камеру, пристыкованную к АПЛ с возможностью отделения от нее. Прочный корпус выполнен из отдельных жестко связанных между собой капсул с разделением их на капсулы для обитания экипажа и капсулы с энергетическими и другими потенциально опасными установками и системами.
Капсулы прикреплены к общей силовой килевой ферме, а спасательная камера выполнена в виде самоходной и управляемой подводной лодки, в которой размещен главный пункт управления атомной подводной лодкой и которая используется для спасения всего экипажа при аварии атомной подводной лодки. Капсулы сообщены между собой переходными люками с герметичными закрытиями и через соединительный блок и разъемный шлюз — со спасательной камерой для прохода в нее экипажа. Достигается повышение безопасности и бесшумности АПЛ, а также повышение возможности спасения экипажа.
Известна атомная подводная лодка (АПЛ), содержащая прочный корпус, охватывающий его легкий корпус, цистерны между этими корпусами и спасательную камеру, пристыкованную к АПЛ с возможностью отделения от нее (см. Павлов А.С. Военные корабли России 1997 — 1998 г.г. Справочник. Якутск, Литограф, 1997 — 151 с. Стр. 17, 18, 23, 24; Букалов В.М., Нарусбаев А.А. Проектирование атомных подводных лодок. Л., Судостроение, 1968, стр. 72-83).
Существующее расчленение среды обитания в прочном корпусе путем применения «прочных» межотсечных переборок подводной лодки носит иллюзорный характер, сохраняя взаимосвязь отсеков по проходящим через переборки многочисленным трубопроводам газов и жидкостей, воздуховодам вентиляции и кабельным трассам (силовым, управления, связи и др.), что зачастую приводит к невозможности локализации повреждений и пожаров на борту, потере управления отсеками и распространением повреждений в соседние отсеки. Такие ситуации неминуемо оканчиваются катастрофами, см. Букань С.П. По следам подводных катастроф. М.: Гильдия мастеров «Русь» — 1992.
Технические средства управления, связи, жизнеобеспечения, пожаротушения и электроснабжения показали свою несостоятельность из-за слабой инженерной защиты и отсутствия надежного локального (отсечного) резерва этих средств, не рационального построения организации при борьбе с авариями, а также опасного непосредственного кон-такта энергоемкого оборудования с экипажем.
Эти результаты ( обеспечение безопасности экипажа) достигаются тем, что в атомной подводной лодке, содержащей прочный корпус, охватывающий его легкий корпус, цистерны между этими корпусами и спасательную камеру, пристыкованную к атомной подводной лодке, прочный корпус выполнен из отдельных жестко связанных между собой капсул с разделением их на капсулы для обитания экипажа и капсулы с энергетическими и другими потенциально опасными установками и системами, причем капсулы прикреплены к общей силовой килевой ферме, а спасательная камера выполнена в виде самоходной и управляемой подводной лодки, в которой размещен главный пункт управления атомной подводной лодкой и которая используется для спасения всего экипажа при аварии атом-ной подводной лодки, при этом капсулы сообщены между собой переходными люками с герметичными закрытиями и через соединительный блок и разъемный шлюз для прохода в спасательную камеру.
Кроме того, на атомной подводной лодке установлены реакторы, имеющие ответвления первого контура на термоэлектрические генераторы с естественной циркуляцией теплоносителя.
Кроме того, каждая капсула снабжена автономными системами пожаротушения и живучести, а обитаемые капсулы имеют еще и автономные системы жизнеобеспечения и связи.
Известна американская атомная подводная лодка «Тритон» (SSRN-586), имеющая кормовую оконечность (КО), содержащую прочный корпус, гребные валы с гребными винта-ми, а также главные упорные подшипники и дейдвуды в кормовом отсеке. (Быховский И.А. Атомные суда. Ленинград, 1961 г., стр. 121-128, 144, табл. 13/3-я строка сверху).
Недостатком этой АПЛ является то, что ее КО не приспособлена для размещения в ней дополнительного оборудования контроля и защиты кормовой полусферы как из-за отсутствия необходимой площади для размещения, так и невозможности обеспечить условия для работы аппаратуры обнаружения.
Известна также российская дизельная ПЛ проекта 877 (Класс «Kilo» -«Варшавянка») (см. Справочник «Военные корабли СССР и России», г. Якутск, изд. 1995 г., стр. 44), имеющая КО с кормовым отсеком, через которые насквозь проходит линия вала, а гребной винт расположен кормовее по отношению к кормовым рулям — прототип.
Недостатком КО данной ПЛ является конструктивная неприспособленность для размещения в ней дополнительных акустических и неакустических средств контроля за наиболее уязвимой кормовой полусферой пространства за ПЛ, систем подводной радиосвязи с выпускаемой антенной и средств активной и пассивной защиты от телеуправляемого и самонаводящегося оружия противника.
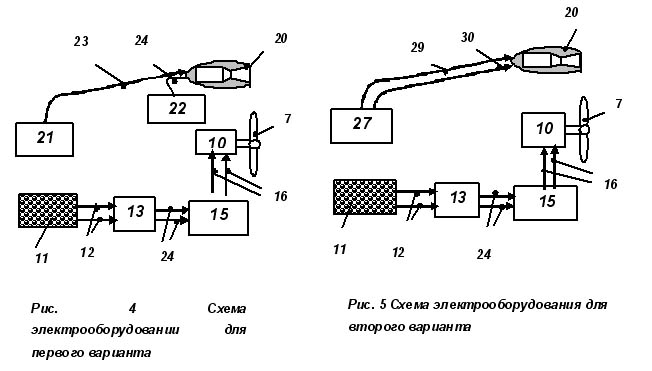
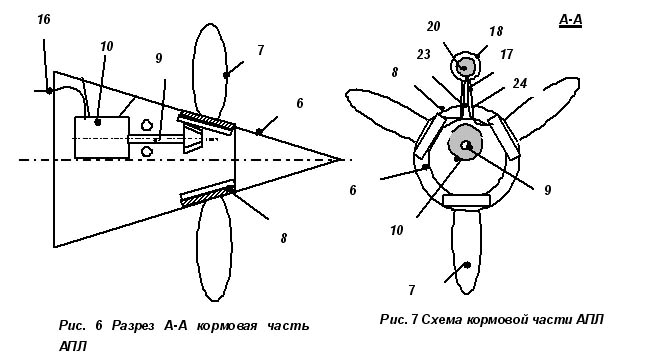
Атомная подводная лодка АПЛ (рис. 1…12) содержит содержащей прочный корпус 1, охватывающий его легкий корпус 2, цистерны 3 между этими корпусами 1 и 2, прочную рубку 4 и спасательную всплывающую камеру 5 , установленную внутри прочного корпуса 1 под прочной рубкой 4 , кормовую оконечность 6 с гребным винтом 7 со ступицей 8, установленной на гребном валу 9, соединенном с электродвигателем 10 и, по меньшей мере, один ядерный реактор 11, соединенный трубопроводами контура циркуляции 12 с турбогенератором 13, который электрическим кабелем 14 соединен с аккумуляторами 15, которые электрическим кабелем 16 соединен с электродвигателем 10. При этом к прочному корпусу 1 прикреплена обтекаемым пилоном 17, по меньшей мере, одна герметичная мотогондола 18 обтекаемой формы с быстросбрасывамой торцовой заглушкой 19 и с жидкостным ракетным двигателем морского исполнения 20 (ГТД). Внутри прочного корпуса 1 могут быть установлены баки окислителя 21 и горючего 22, соединенные трубопроводами окислителя 23 и горючего 24 с каждым жидкостным ракетным двигателем морского исполнения 20. Внутри прочного корпуса 1 могут быть установлены термоэлектрические генераторы 25, соединенные трубопроводами контура циркуляции 26 с ядерным реактором 11.
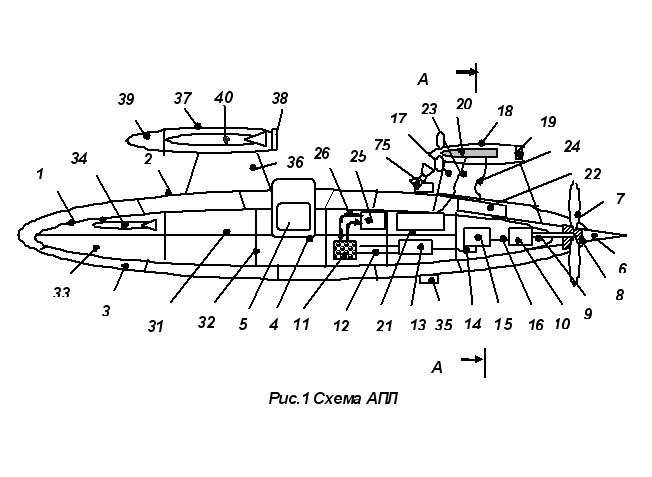
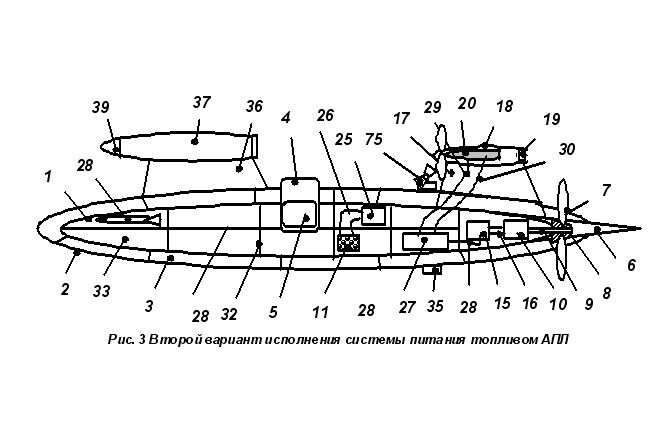
Возможен вариант исполнения АПЛ в котором внутри прочного корпуса 1 установлен катализатор водорода и кислорода 27, соединенный кабелем 28 с аккумуляторами 15. Катализатор водорода и кислорода 27 трубопроводами 29 и 30 соединен с ГТД 20.

АПЛ содержит палубы 31, переборки 32, разделяющие внутреннюю полость прочного корпуса 1 на отсеки 33. В одном или двух отсеках 33 установлены торпеды 34.На легком корпусе 2 установлен силовой пояс 35 для крепления сопел крена.
АПЛ может иметь установленные на пилонах 36 контейнеры 37 с быстросбрасываемой заглушкой 38 и быстросбрасываемым обтекателем 39, например при помощи пироболтов). Внутри контейнера 37 установлены ракеты 40.
Газотурбинный двигатель морского исполнения 20 (рис. 8) содержит турбокомпрессор 41, содержащий в свою очередь, компрессор 42, камеру сгорания 43, турбину 44 и выхлопное устройство 45.
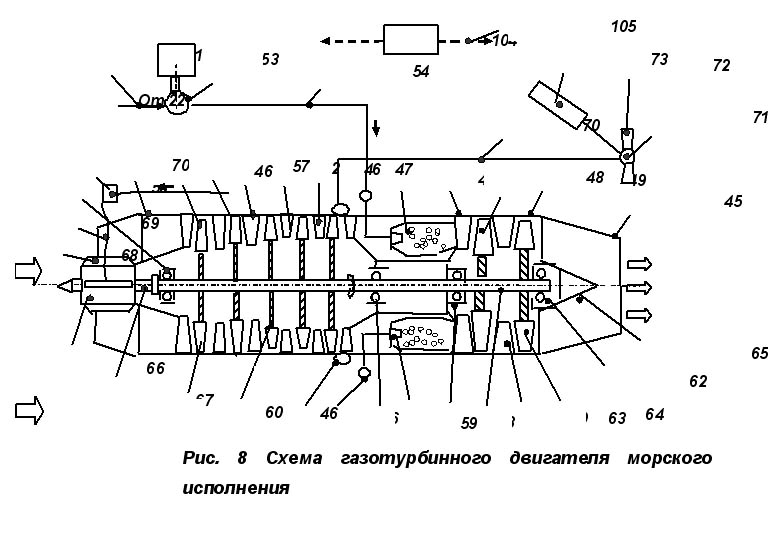 Компрессор 42 имеет ротор 46 и статор 47. Турбина 44 также имеет ротор 48 и статор 49. Ротор 46 компрессора 42 и ротор 48 турбины 44 соединены по-средством вала 50 турбокомпрессора 41 (рис. 1 и 2).
Компрессор 42 имеет ротор 46 и статор 47. Турбина 44 также имеет ротор 48 и статор 49. Ротор 46 компрессора 42 и ротор 48 турбины 44 соединены по-средством вала 50 турбокомпрессора 41 (рис. 1 и 2).
Газотурбинный двигатель морского исполнения 20 (рис. 8) содержит систему топливоподачи с топливопроводом низкого давления 51, подключенным ко входу в топливный насос 52, имеющий привод 53, топливопровод высокого давления 54, вход которого соединен с топливным насосом 52, а выход соединен с кольцевым коллектором 55, кольце-вой коллектор 55 соединен с форсунками 56 камеры сгорания 43.
Газотурбинный двигатель морского исполнения 20 имеет корпус 57 турбокомпрессора 41. Компрессор 42 содержит опоры 58 и 59. Ротор 46 компрессора 42 содержит рабочие лопатки 60.
Турбина 44 содержит переднюю опору 61 и заднюю опору 62, а ее ротор 49 содержит рабочие лопатки 63, а статор 49 — сопловые аппараты 64 (количество ступеней турбины может быть от одной до нескольких). Далее находятся выходной обтекатель 65..
В передней части турбокомрпессора 41 установлен электродвигатель 66 , выходной вал которого 67 соединен с валом 50 турбокомпресора 41 (рис. 1). Электродвигатель 66 имеет очень большую мощность и обеспечивает до 70…90 % мощности, необходимой для при-вода ротора 46 компрессора 42. Электродвигатель 66 для охлаждения имеет ребра 68, выполненные вдоль его корпуса, для подвода электроэнергии электродвигатель 66 кабелем 69 через коммутатор 70 соединен с аккумуляторами 15 АПЛ.
Для управления АПЛ по крену применены блоки 71 сопел крена 72 с приводом 73. Блоки сопел крена 72 трубопроводом 74 соединены с коллектором 75, установленном на выходе из компрессора 42.
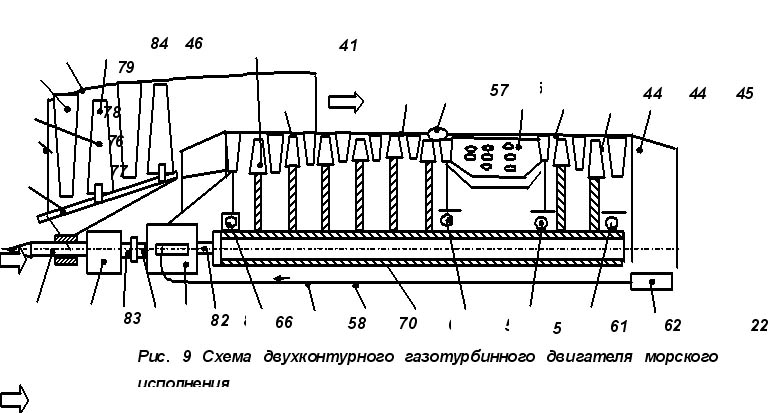
Возможен вариант исполнения ГТД двухконтурным (рис. 9) с первым и вторым контурами. В этом случае в передней части турбокомпрессора 41 установлен вентилятор 76, со-держащий ротор 77 с рабочими лопатками 78 и статор 79. Электродвигатель 66 в этом случае выполнен с двумя валами 67 и 80. ГТД 20 может быть оборудован редуктором 81 с входным валом 82 и выходным валом 83. К выходному валу 80 электродвигателя 66 при-соединен входной вал 82 редуктора 81, а выходной вал 83 соединен с ротором 77 вентилятора 76. Вентилятор 76 оборудован обтекателем 84.
В предложенном газотурбинном двигателе 20 электродвигатель 66 может обеспечить до 70…90 % энергии, необходимой для его работы. В некоторых случаях, например при израсходовании топлива или поломке топливной системы, этот газотурбинный двигатель может работать вообще без горючего. Это обеспечит выполнение боевой задачи в любых условиях. На АПЛ может быть установлен один или несколько ГТД морского исполнения АПЛ может иметь крылья 85 (рис 2) для обеспечения полета АПЛ на дозвуковых скоростях на очень малых высотах: от 10 дот 30 м над уровнем моря, что делает АПЛ невидимой для РЛС. Это повысит неуязвимость АПЛ в режиме атаки из надводного положения и облегчит запуск торпед и ракет.
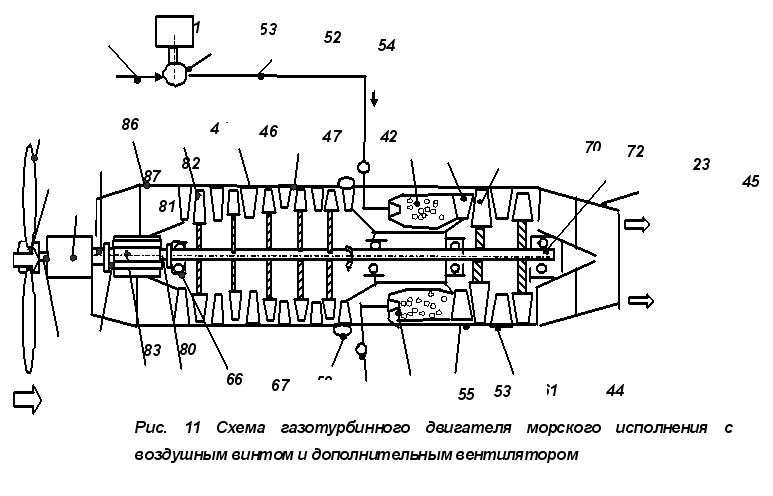
Возможен вариант исполнения ГТД 20 (рис. 10) с воздушным винтом 86, ступица которого 87 соединена с выходным валом 83 редуктора 81.
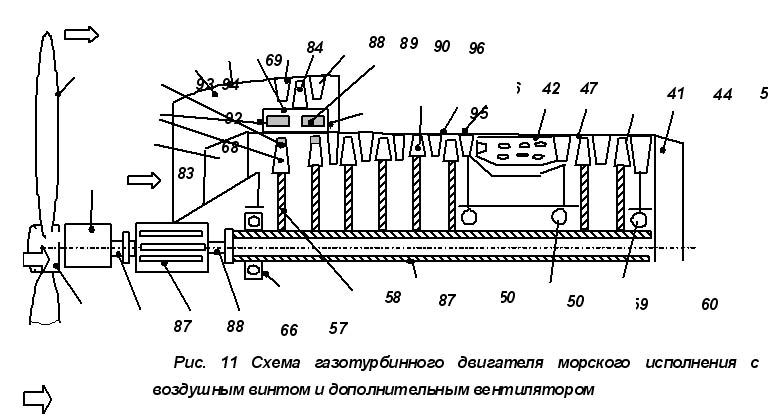
Возможен вариант исполнения ГТД 20 с дополнительным компрессором 88 (рис. 11). Дополнительный компрессор 88 имеет ротор 89 и статор 90. Ротор 89 имеет ступицу 91.Особенностью этого варианта ГТД является то, что ротор 89 дополнительного компрессора 88 соединен с ротором компрессора 46 посредством магнитной муфты 92, имеющей ведущую полумуфту 93 с ведущими магнитами 94 и ведомую полумуфту 95 с ведомыми магнитами 96. Конструктивно ведомая полумуфта совмещена со ступицей 91.
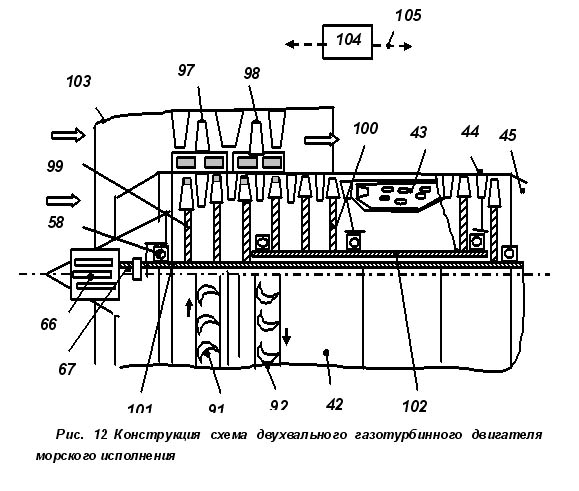
Возможно применение схемы двигателя с двумя ступенями дополнительного компрессора 97 и 98 (рис. 12), имеющими возможность вращения в противоположные стороны. В этом варианте двигателя компрессор 42 выполнен двухкаскадным , т. е. содержит ротор компрессора низкого давления 99 и ротор компрессора высокого давления 100, соответственно с внутренним валом 101 и внешним валом 102, не связанными кинематически между собой. Валы 101 и 102 выполнены так, что при работе всегда вращаются в противоположные стороны. Это достигнуто за счет разных углов установки направляющих и рабочих лопаток в обеих каскадах компрессора. Противоположное вращение уменьшает реактивный момент, действующий на АПЛ и гироскопический эффект, создающий радиальные нагрузки на подшипники двигателя. Дополнительные компрессоры 97 и 98 могут быть установлены внутри обтекателя 103. Это позволит устранить радиальное перетекание воздуха и увеличить КПД двигатели. Кроме того обтекатель снижает шум двигателя.
Для управления всеми системами АПЛ она оборудована бортовым компьютером 104, который электрическими 105 связями соединен со всеми крапанами и регуляторами, в том числе с приводом 53, приводом 73, коммутатором 70 и т. д.
АПЛ первого варианта исполнения работает следующим образом (рис. 1.и 2). Запускают ядерный реактор 13 и теплоноситель по трубопроводам циркуляции 12 подается в турбогенератор 13. Турбогенератор 13 вырабатывает электрический ток, который по электрическому кабелю 14 подается в аккумулятор 15, из которого по электрическому кабелю 16 подается в электродвигатель 10. Электродвигатель 10 через гребной вал 9 приводит во вращение ступицу 8 с гребными винтами 7. Подводная лодка движется в подводном положении. Одновременно часть теплоносителя по трубопроводам циркуляции 26 поступает в термоэлектрические генераторы 25, которые дополнительно вырабатывают электрическую энергию, например в режиме «полета» АПЛ или при отказе турбогенератора 13.
Для значительного ускорения движения АПЛ в режиме атаки она переводится в над-водное положение. Потом запускают газотурбинный двигатель морского применения 20. Газотурбинный двигатель морского применения 20 запускается следующим образом.
При работе газотурбинного двигателя морского исполнения 20 осуществляют его за-пуск путем подачи электроэнергии на электродвигатель 66 от аккумуляторов 15.. Потом включают привод 53 топливного насоса 52 и топливный насос 52 подает топливо в камеру сгорания 43, точнее в форсунки 56, где оно воспламеняется при помощи электрозапальника (на рис. 1…12 электрозапальник не показан).Ротор 48 турбины 44 раскручивается и раскручивает ротор 46 компрессора 42.
При останове винтовентиляторного авиационного газотурбинного двигателя все операции осуществляются в обратной последовательности.
АПЛ атакует цели в надводном положении в движении АПЛ в режиме полета, со скоростью М=0,5…1,0, что делает ее неуязвимой и позволяет выпустить торпеды 34 и раке-ты 40 из надводного положения. Учитывая, что торпеды 34 уже имеют начальную скорость М=0,5…1,0, уклониться от торпедной атаки невозможно. Ракеты 40 могут применяться не только для решения оперативно- тактических задач, но и для решения стратегических задач, т е. стрельбы из нейтральных вод на расстояние 3000…5000 км. При этом АПЛ остается неуязвимой и если ее местонахождение будет обнаружено, то из-за большой скорости АПЛ в надводном положении и небольшого отрезка времени пребывания в надводном положении от 10 до 60 сек, она не может быть поражена После выпуска тор-пед 34 и ракет 20 АПЛ уходит в подводное положение. Возможна повторная атака.
Применение изобретения позволило:
1. Обеспечить кратковременное значительное увеличение скорости движения АПЛ в надводном положение и даже ее полет со скоростью М = 0,5..1,0 в режим атаки для запуска торпед и ракет в надводном положении для обеспечения надежности запуска и точности попадания при неуязвимости АПЛ для средств обороны противника.
2. Обеспечить надежное управление вектором тяги ЖРД и управление атомной под-водной лодки по углу крену (по ракетной терминологии) за счет применения двух блоков сопел крена, содержащих по два оппозитно установленных сопла крена и их рационально-го крепления на двигателе на кольцевом коллекторе и применения четырех наклонных тяг, обеспечивающих передачу вращающего момента на сопло двигателя и далее — на си-ловую раму при минимальном весе элементов конструкции, передающих момент вращения.
3. Значительно повысить надежность работы системы управления ракетой по крену за счет применения двух трехходовых кранов: газа и горючего и общего привода для них. Такая конструкция предотвращает невключение одного из сопел крена, например, вследствие отказа пускоотсечного клапана горючего.
Авторы статьи
Патентный поверенный РФ Болотин Николай Борисович
Нефедова Елена
Болотина Марина


