 Опубликовано в рубрике
Опубликовано в рубрике 
Изобретение относится к области вооружения, а именно к средствам и способам ведения оборонительных действий с применением одного или нескольких управляемых лучей лазера с ядерной накачкой невероятной мощности. Код изделия «поражающий». Газодинамический лазер Г. Л. [ 1 — 4 ] — газовый лазер, в котором инверсия населенностей создаётся в системе колебательных уровней энергии молекул газа путём адиабатического охлаждения нагретых газовых масс, движущихся со сверхзвуковой скоростью.
Г. л. состоит из нагревателя, сверхзвукового сопла (или набора сопел, образующих т. н. сопловую решётку), оптического резонатора и диффузора. В нагревателе происходит тепловое возбуждение специально подобранной смеси газов (в результате сгорания топлива или подогрева с помощью электрических разрядов и ударных волн). При течении газа в сверхзвуковом сопле смесь быстро охлаждается. Необходимая для возбуждения генерации инверсия населенностей энергетических уровней рабочего компонента смеси достигается, если: 1) скорость опустошения (релаксации) нижнего уровня лазерного перехода в процессе расширения выше скорости релаксации верх. уровня; 2) время опустошения верх. уровня больше характерного т. н. газодинамич. времени (времени движения газа до резонатора). Если для определения пары энергетических уровней эти условия выполнены, то из-за сильной зависимости времён релаксации от температуры и плотности газа, начиная с некоторого момента от начала расширения, быстрое падение населённости верх. уровня сменяется медленным, тогда как населённость нижнего продолжает уменьшаться с заметной скоростью. Часть избыточной энергии верх. уровня может быть трансформирована в резонаторе в энергию лазерного луча. Диффузор служит для торможения потока и повышения давления газа, который выбрасывается в атмосферу.
Активная среда. Указанным требованиям наиб. полно отвечают колебательному состояния молекул, обладающие большими временами жизни (по сравнению с электронными и вращательными уровнями). Процессы колебательной релаксации позволяют осуществить: полную инверсию колебательных уровней и т. н. частичную колебательно-вращательную инверсию. В соответствии с этим «рабочими» частицами Г. л. служат как многоатомные, так и двухатомные гетероядерные молекулы, имеющие, в отличие от гомоядерных молекул, разрешённые колебательно-вращательные переходы.
Первым и наиб. распространённым является Г. л. на полной колебательной инверсии между уровнями 0001 и 1000 (или 0200) молекулы CO2. Соответствующие длины волн генерации =10,4-9,4 мкм (рис. 2). Уровень 0001 соответствует асимметричным колебаниям молекулы CO2, уровни 1000 и 0200 — колебаниям деформационного и симметрического типов. Однако в чистом CO2 необходимое соотношение времён релаксации этих уровней не выполнено. Это соотношение сдвигается в нужную сторону при добавлении определенного кол-ва молекул H2, H2O, атомов Не и др. Их столкновения с молекулами CO2 опустошают нижние лазерные уровни (1000 и 0200) значительно быстрее, чем уровень 000I. Увеличение запаса колебательной энергии в охлаждённом газе достигается также введением в газовую смесь в форкамере донорного газа, молекулы которого релаксируют медленно и способны быстро передавать запасённую в них энергию на уровни, соответствующие асимметричным колебаниям молекулы CO2. Роль донорного газа обычно выполняют возбуждённые молекулы N2, колебательные уровни которых близки к уровням молекулы CO2.
Г. л. на продуктах сгорания является простейшим Г. л., имеющим практическое значение. В форкамере сжигается углеродсодержащее топливо в воздухе, горячие продукты сгорания пропускаются через сопловой аппарат и резонатор . В зависимости от используемого топлива и условий его сжигания давление р0, температуpa T0 и хим. состав продуктов в форкамере меняются в широких пределах (р0=5-100 атм, T0= 1500-3000 К). Таким способом, как правило, не удаётся получить высокой эффективности. Г.л. на продуктах сгорания имеет низкий кпд ( 1%). Это обусловлено тем, что только 7-10% от энергии сгорания идёт на возбуждение колебательного уровней молекулы CO2. Кроме того, из-за релаксации потерь энергии в потоке, невысокого отношения энергии кванта лазерного излучения к энергии кванта, необходимого для возбуждения асимметричного колебания молекулы CO2 (квантового кпд), и относительно небольшой эффективности резонатора не весь энергозапас может быть трансформирован в лазерное излучение. Реально в Г. л. на продуктах сгорания энергия, излучаемая на единицу массы сжигаемой смеси (уд. энергия излучения) 20 кДж/кг, а показатель усиления 0,5-1,0 M-1.
Другие типы Г. л. Один из путей повышения эффективности Г. л. состоит в снижении релаксации потерь запасённой колебательной энергии. Из-за сравнительно высоких скоростей релаксации колебательных уровней молекулы CO2 практически вся теряемая средой энергия преобразуется в теплоту, причём это происходит в околокритической части сопла, где высоки температуpa и плотность газа. Отсутствие CO2 в этой части потока снижает до минимума потери энергии. Поэтому необходимое кол-во CO2 вводят в поток возбуждённого донорного газа в сверхзвуковую или околозвуковую часть сопла. При этом температуpa вводимого CO2 может быть низкой ( 200- 300 К). В таком варианте Г. л. (Г. л. «с подмешиванием») появляется дополнит. возможность повышения полного числа колебательно возбуждённых молекул за счёт нагревания донорного газа до более высоких температур Т0=4000-5000 К. Уд. энергия излучения достигает 50-100 кДж/кг, показатель усиления 3-5 м-1, полный кпд ~2-3%.
Эффективность Г. л. повышается и в том случае, когда хотя бы часть запасённой энергии удаётся преобразовать в лазерное излучение с большим квантовым кпд. В случае CO2 эта возможность связана с т. н. каскадной генерацией одновременно на двух переходах 0001-1000(0200) и 1000(0200)-0l10. Последняя имеет квантовый кпд 71,6%. Условия для возникновения двухчастотной генерации более жёсткие, чем в одночастотном режиме. Они легче достигаются в Г. л. «с подмешиванием». По мере вывода каскадного излучения из резонатора внутренняя энергия системы падает и условие двухчастотной генерации перестаёт выполняться. Оставшаяся в среде колебательная энергия (верх. переход) трансформируется в лазерное излучение следующим, расположенным ниже по потоку резонатором, настроенным на переходы 0001-1000(0200).
Г. л. на CO2 работают также на др. колебательных переходах, напр. на переходах 0310-1000, 0310-0220 и 0200-0l10 ( =18,4, 16,7 и 16,2 мкм). В этом случае необходимы замораживание как можно большей энергии в системе уровней деформации и симметричных колебаний молекулы и охлаждение газа до температурр 70- 100 К. Наилучшие результаты получены для смесей CO2 с Ar и Ne и сопловых аппаратов с большими степенями расширения. В качестве рабочего компонента в Г. л. используются и др. трёхатомные молекулы (N2O, COS, CS2).
Действие др. типа Г. л. основано на инверсии в системе колебательно-вращательных уровней в двухатомных гетероядерных молекулах (СО, HCl и др.). Инверсия возникает между вращательными подуровнями различных возбуждённых колебательных уровней. Если это возбуждение мало, то вращательные подуровни, между которыми имеется инверсия, соответствуют очень большим значениям вращательного квантового числа, а потому имеют малую населённость. Это, в свою очередь, определяет малый показатель усиления, недостаточный для возбуждения генерации. Генерация возбуждается, если т. н. колебательная температуpa Ткол (эфф. температуpa, с которой заселены колебательные уровни) и температура газа T находятся в соотношении Наиб. высокое значение расширяющегося газа может быть сохранено в системе слабо релаксирующих уровней, напр. в системе уровней молекулы СО ( = 5 мкм). Необходимое охлаждение газа достигается в сопловых аппаратах с высокой степенью расширения.
За последние несколько лет большую популярность в мире завоевали системы глобального позиционирования (определения точного местоположения) GPS. Это, действительно, очень перспективный рынок. Объем мирового рынка услуг глобального позиционирования в 2003 г.составил $500 млн, а по прогнозу Ovum, в 2005 г. его объем составит $9.75 млрд (при 376 млн абонентов). Некоторым основам функционирования систем глобального позиционирования и их применению в мире и посвящена данная статья. Первые системы глобального позиционирования GPS (Global Positioning System) разрабатывались исключительно для военных целей. Глобальная навигационная система GPS предназначена для передачи навигационных сигналов, которые могут одновременно приниматься во всех регионах мира. Инициатором создания GPS-системы стало Министерство Обороны США. Ее разработка началась в 1973 г., когда Министерство Обороны США перестала устраивать радионавигационная система, состоящая из наземных навигационных систем Loran-C и Omega, и спутниковой системы Transit. Проект создания спутниковой сети для определения координат в режиме реального времени в любой точке земного шара был назван NAVSTAR GPS (NAVigation Satellite Timing And Ranging Global Positioning System — навигационная система определения времени и дальности). Используемая сейчас аббревиатура GPS появилась позднее, когда система стала использоваться не только для военных, но и для мирных целей. Первая штатная орбитальная группировка системы разворачивалась с июня 1989 г. по март 1994 г. На орбиту были выведены 24 навигационных спутника Block II. Окончательно GPS-система была введена в эксплуатацию в 1995 г. В настоящее время она эксплуатируется и обслуживается Министерством Обороны США. В состав GPS-системы входят 3 основных сегмента: космический, наземный и пользовательский. Космический сегмент состоит из 28 автономных спутников, равномерно распределенных по орбитам с высотой 20350 км (для полнофункциональной работы системы достаточно 24 спутников). Каждый спутник излучает на 2 частотах специальный навигационный сигнал, в котором зашифровано 2 вида кода. Один из них доступен лишь немногим пользователям, среди которых, конечно же, военные и федеральные службы США. Кроме этих 2 сигналов, спутник излучает и третий, информирующий пользователя о дополнительных параметрах (состоянии спутника, его работоспособности и др.). Параметры орбит спутников периодически контролируются сетью наземных станций слежения (всего 5 станций, находящихся в тропических широтах), с помощью которых (не реже 1-2 раз в сутки): вычисляются баллистические характеристики, регистрируются отклонения спутников от расчетных траекторий движения, определяется собственное время бортовых часов спутников, осуществляется мониторинг исправности навигационной аппаратуры и др. При этом для обнаружения отказов оборудования спутников с помощью наземных станций обычно требуется несколько часов. Третий сегмент GPS-системы — это GPS-приемники, выпускаемые и как самостоятельные приборы (носимые или стационарные), и как платы для подключения к ПК, бортовым компьютерам и другим аппаратам. Основные возможности GPS-системы (при наличии приемника GPS-сигнала):
— определение местонахождения мобильного абонента;
— определение наиболее короткого и удобного пути до пункта назначения;
— определение обратного маршрута;
— определение скорости движения (максимальной, минимальной, средней);
— определение времени в пути (прошедшего и сколько потребуется еще) и др.
Основные характеристики GPS-системы приведены в таблице 1.
| Количество спутников в орбитальной группировке | 28 |
|---|---|
| Число орбитальных плоскостей | 63 |
| Число спутников в каждой плоскости | 48 |
| Высота орбиты (км) | 202350 |
| Наклонение орбиты (градус) | 55 |
| Период вращения спутников(часы) | 12 |
| Масса спутника (кг) | 55 |
| Мощность солнечных батарей спутника(Вт) | 450 |
| Срок эксплуатации(лет) | 7,5 |
| Поляризация | правосторонняя |
| Погрешность определения | 100(С/А-код); 16(Р-код) |
| Погрешность определения | 10(С/А-код);0,1(Р-код) |
| Погрешность определения времени (нс) | 340(С/А-код);90(Р-код) |
| Надежность навигационных определений (%) | 95 |
Основы функционирования GPS-системы
Теория дальнометрии основана на вычислении расстояния распространения радиосигнала от спутника к приемнику по временной задержке. Если знать время распространения радиосигнала, то пройденный им путь легко вычислить, просто умножив время распространения радиосигнала на скорость света.
Каждый спутник GPS-системы непрерывно генерирует радиоволны 2 частот — (L1=1575.42 МГц и L2=1227.60 МГц). Навигационный сигнал представляет собой фазоманипулированный псевдослучайный PRN-код (Pseudo Random Number code). PRN-код бывает 2 типов. Первый — C/A-код (Coarse Acquisition code — грубый код) используется в гражданских приемниках. Он позволяет получать лишь приблизительную оценку местоположения, поэтому и называется «грубым» кодом. C/A-код передается на частоте L1 с использованием фазовой манипуляции псевдослучайной последовательности длиной 1023 символа. Защита от ошибок обеспечивается посредством кода Гоулда. Период повторения С/А-кода — 1 мс. Другой код — P (precision code — точный код) — обеспечивает более точное вычисление координат, но доступ к нему ограничен. В основном, P-код предоставляется военным и (иногда) федеральным службам США (например, для решения задач геодезии и картографии). Этот код передается на частоте L2 с применением сверхдлинной псевдослучайной последовательности с периодом повторения 267 дней. Этот код доступен в принципе и гражданским лицам. Но алгоритм его обработки гораздо более сложен, поэтому и аппаратура стоит дороже. В свою очередь, частота L1 модулируется как С/А, так и Р-кодом. В сигнале GPS может присутствовать и так называемый Y-код, являющийся зашифрованной версией P-кода (в военное время система шифровки может меняться).
Кроме навигационных сигналов, спутник непрерывно передает различного рода служебную информацию. Пользователь GPS-приемника информируется о состоянии спутника и его параметрах: системном времени; эфемеридах (точных данных об орбите спутника); прогнозируемом времени задержки распространения радиосигнала в ионосфере (т. к. скорость света меняется при прохождении разных слоев атмосферы), работоспособности спутника (в так называемом «альманахе» содержатся обновляемые каждые 1…5 мин сведения о состоянии и орбитах всех спутников).
В основе определения координат GPS-приемника лежит вычисление расстояния от него до нескольких спутников, расположение которых считается известным (эти данные находятся в принятом с GPS-спутника «альманахе»). В геодезии метод вычисления положения объекта по измерению его удаленности от точек с заданными координатами называется «трилатерацией».
Если известно расстояние до одного спутника, то координаты приемника определить нельзя (он может находиться в любой точке сферы радиусом, описанной вокруг спутника). Пусть известна удаленность приемника от второго спутника. В этом случае определение координат также не представляется возможным — объект находится на окружности, которая является пересечением двух сфер. Расстояние до третьего спутника сокращает неопределенность в координатах до двух точек. Этого уже достаточно для однозначного определения координат — дело в том, что из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близости от нее), а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, для трехмерной навигации теоретически достаточно знать расстояния от приемника до 3 спутников.
Глобальная Навигацио́нная Спу́тниковая Систе́ма (ГЛОНА́СС) — советская и российская спутниковая система навигации, разработана по заказу Министерства обороны СССР. Одна из двух функционирующих на сегодня систем глобальной спутниковой навигации[1]. Основой системы должны являться 24 спутника, движущихся над поверхностью Земли в трёх орбитальных плоскостях с наклоном орбитальных плоскостей 64,8° и высотой 19 100 км. Принцип измерения аналогичен американской системе навигации NAVSTAR GPS. В настоящее время развитием проекта ГЛОНАСС занимается Федеральное космическое агентство (Роскосмос) и ОАО «Российские космические системы»[2].
Российская глобальная навигационная спутниковая система (ГЛОНАСС) предназначена для оперативного навигационно-временного обеспечения неограниченного числа пользователей наземного, морского, воздушного и космического базирования. Доступ к гражданским сигналам ГЛОНАСС в любой точке земного шара на основании указа Президента РФ предоставляется российским и иностранным потребителям на безвозмездной основе и без ограничений.
Для обеспечения коммерциализации и массового внедрения технологий ГЛОНАСС в России и за рубежом Постановлением Правительства РФ в июле 2009 г. был создан «Федеральный сетевой оператор в сфере навигационной деятельности», функции которого были возложены на ОАО «Навигационно-информационные системы».
Основное отличие от системы GPS в том, что спутники ГЛОНАСС в своем орбитальном движении не имеют резонанса (синхронности) с вращением Земли, что обеспечивает им большую стабильность. Таким образом, группировка КА ГЛОНАСС не требует дополнительных корректировок в течение всего срока активного существования. Тем не менее, срок службы спутников ГЛОНАСС заметно короче.
Боевой лазер (рис. 1…16) содержит основание 1, с установленным на нем бронеотсеком 2, в свою очередь имеющий броню 3.
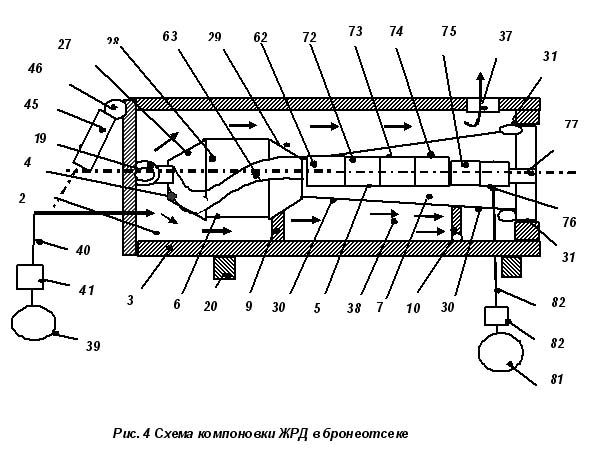
В бронеотсеке 2 (рис. 1 и 2) установлен горизонтально жидкостный ракетный двигатель- ЖРД 4, имеющий турбонасосный агрегат ТНА 5, камеру сгорания 6 с соплом 7.
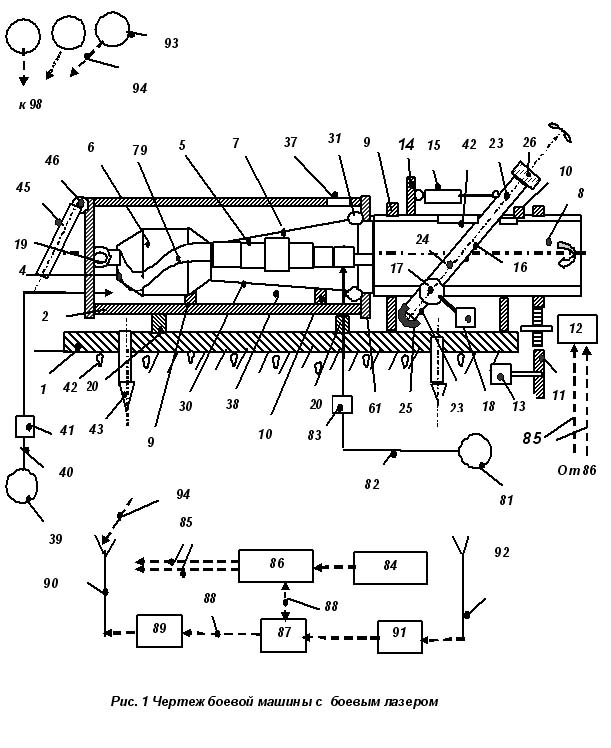

Так как нет никаких ограничений и требований к конструкции ЖРД, применяемого для боевого лазера в дальнейшем рассмотрен пример однокамерного ЖРД, выполненного по закрытой схеме.
Соосно с соплом 7 установлено с возможностью поворота выхлопное устройство 8. Выхлопное устройство 8 может быть цилиндрической форы или конической формы и оно установлено на двух опорах 9 и 10 и через редуктор 11 соединено с приводом 12.
С приводом 12 соединен датчик угла поворота 13. На выхлопном устройстве 8 установлен упор 14, к которому прикреплен привод 15, например гидроцилиндр, соединенный с резонатором 16. Резонатор (резонаторы) 16 установлен с возможностью поворота на цилиндрическом шарнире 17 на выхлопном устройстве 8. С цилиндрическим шарниром 17 связан датчик угла поворота 18 ЖРД 4 используется как источник энергии. ЖРД 4, установлен на центральном шарнире 19 и на двух опорах 20.
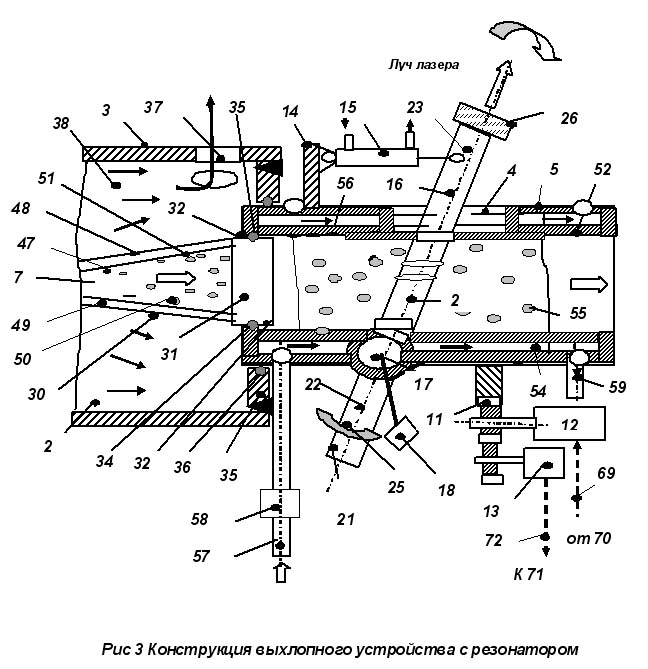
Каждый резонатор 4 содержит корпус 21, цилиндрической формы, выполненный из трех соосно установленных частей первой 22, второй 23 и средней 24 .В первой части 22 корпуса 21 установлено зеркало 25, во второй части 23 корпуса 21 установлен объектив 26. ЖРД 4 содержит камеру сгорания 6 и турбонасосный агрегат ТНА 5. Камера сгорания 6 содержит головку 27 и сопло 7, которое содержит цилиндрическую часть 28, сужающуюся часть 29 и расширяющуюся часть 30 и коллектор горючего 31. Коллектор горючего 31 выполнен с цилиндрической наружной поверхностью 32 и установлен в отверстии 33, которое выполнено в выхлопном устройстве 8, и уплотнено уплотнением 34 выхлопное устройство 8 уплотнено относительно бронированного торца 35 уплотнением 36. (рис. 3). Такая конструкция описанного выше соединения сделана для предотвращения огромных температурных напряжений в деталях ЖРД 4 и для исключения попадания на узлы ЖРД 4 атмосферных осадков.
На боковой поверхности брони 3 выполнены в верхней части отверстия 37 для продувки его полости 38 с целью охлаждения узлов ЖРД 4. Для продувки полости 38 внутри бронеотсека 2 выполнена система продувки, которая содержит баллон 39 со сжатым воздухом или инертным газом, трубопровод продувки 40 и клапан продувки 41.
На выхлопном устройство 8 выполнены щели 42 которых установлены вторые части 23 корпусов 21 резонаторов 16 (рис. 1 и 3). Части 23 могут быть уплотнены для исключения попадания атмосферных осадков внутрь выхлопного устройства. 4. Основание 1 крепится к грунту 43 при помощи анкерных болтов 44 и при помощи реактивного упора 45, закрепленного шарниром 46 на бронеотсеке 2.
Как сужающаяся 29 так и расширяющаяся 30 части сопла 7 выполнены с возможностью регенеративного охлаждения (фиг. 3) и содержат две стенки; внутреннюю стенку 47 и наружную стенку 48 с зазором 49 между ними для прохождения охлаждающего горючего. На внутренней поверхности внутренней стенки 47 нанесен слой урана 235 – 50, а в саму внутреннюю стенку 47 внедрены частицы урана 238 – 51. (фиг.3).
Аналогичную конструкцию имеет выхлопное устройство 8 (рис. 3…5) Оно выполнено с возможностью регенеративного охлаждения и содержат две стенки; внутреннюю стенку 52 и наружную стенку 53 с зазором 54 между ними для прохождения охлаждающего горючего. На внутренней поверхности внутренней стенки 52 нанесен слой урана 235 – 55, а в саму внутреннюю стенку 51 внедрены частицы урана 238 – 56. (рис. 3). Система охлаждения выхлопного устройства 8 включает подводящий трубопровод 57, с клапаном 58 и отводящий трубопровод 59.
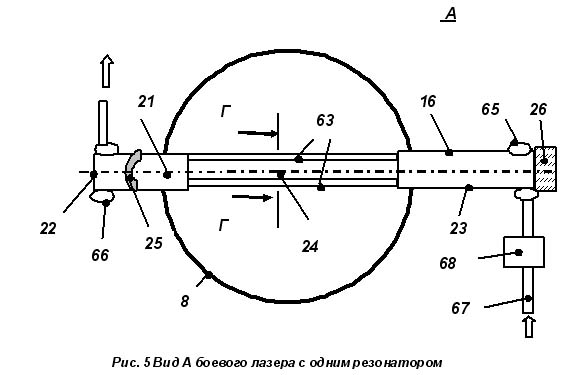
Резонаторы 16 также выполнены с возможностью регенеративного охлаждения (рис. 5 …9). Трубки 21 выполнены с двумя стенками внутренней 60 и наружной 61 с зазором 62 между ними. Кроме того средняя часть 24 выполнена в виде двух параллельно установленных обтекаемых профилей 63, при этом возможно и их выполнение охлаждаемыми (рис. 6), т. t. с полостью 64 внутри них включенной в систему охлаждения.
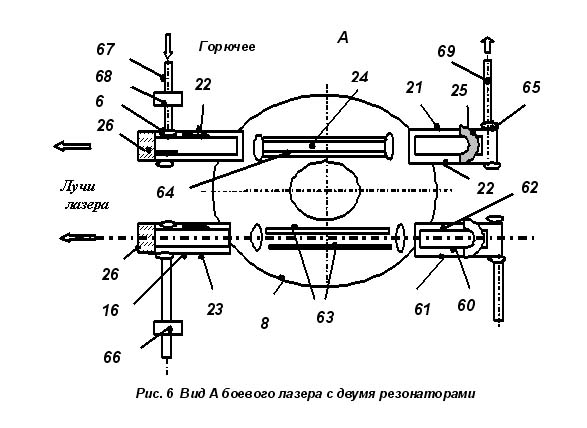
При этом система охлаждения резонаторов 16 дополнительно включает входной коллектор 65, выходной коллектор 66, подводящий трубопровод 67 с клапаном 68 и отводящий трубопровод 69. Кроме того, на поверхности обтекаемых профилей 63 может быть нанесено покрытие урана 235 – 70, а в саму их стенку внедрены частицы урана 235 -71.

Турбонасосный агрегат 5 содержит (рис. 1 и 6) основную турбину 72, насос окислителя 73, насос горючего 72, дополнительный насос горючего 75, пусковую турбину 76 с выхлопной трубой 77. Соосно с ТНА 5 установлен газогенератор 78, который газоводом 79 соединен с головой 27 камеры сгорания 6. ТНА 5 крепится к камере сгорания 6 при помои тяг 80.
Боевой лазер (рис. 1 и 3) содержит баллон сжатого воздуха 81, с которым соединен трубопровод высокого давления 82, имеющий клапан 83. Другой конец трубопровода высокого давления 82 соединен с пусковой турбиной 76. К пусковой турбине 76 подсоединена выхлопная труба 77 для сброса воздуха..
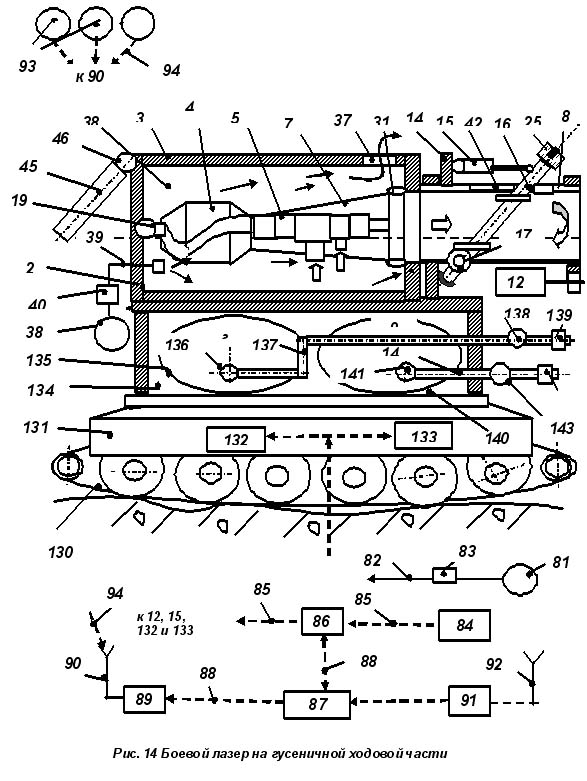
Боевой лазер (рис. 1) содержит источник электроэнергии 84, силовой кабель 85 соединяющий источник электроэнергии 84 с коммутатором 86, к которому присоединены также силовыми кабелями 85 все потребители электроэнергии, в частности приводы 12 и 15. На боевом лазере установлен бортовой компьютер 87, к которому электрическими связями 89 присоединены приемник системы Глонасс 89 с антенной 90 и приемно-передающее устройство 91 с антенной 92. Связь приемника системы Глонасс 89 со спутниками 93 осуществляется при помощи антенны 90 по радиоканалу 94.
Возможен вариант исполнения боевого лазера с ядерным реактором 95, установленным внутри камеры сгорания 6, предпочтительно внутри ее цилиндрической части 27 (фиг.9). Это не только увеличит энергию лазерных лучей за счет использования тепловой энергии ядерного реактора 95, но и повысит его КПД за счет радиоактивной накачки продуктов сгорания и, самое главное, во много раз увеличит время непрерывной работы боевого лазера за счет снижения расхода горючего примерно в 10…20 раз) и сжигания его при низкой (минимально- возможной температуре.
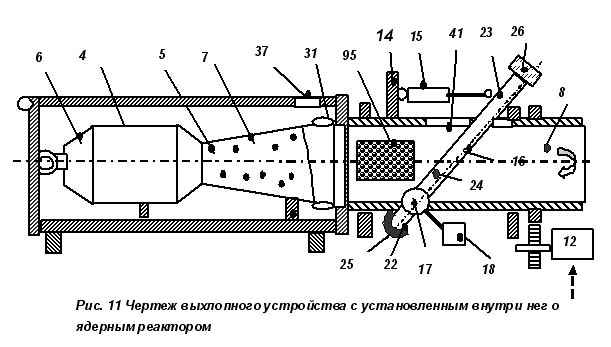
Возможен вариант исполнения боевого лазера с ядерным реактором 95, установленным внутри выхлопного устройства 8 (рис.10).
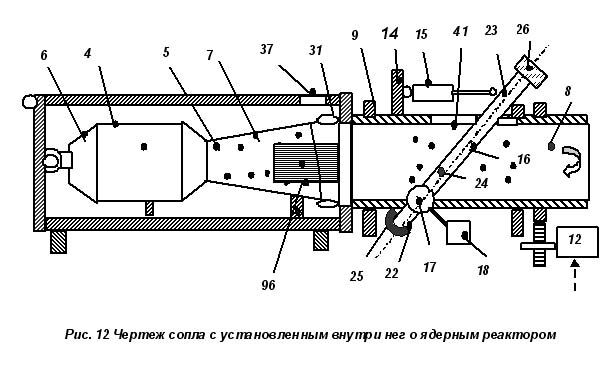
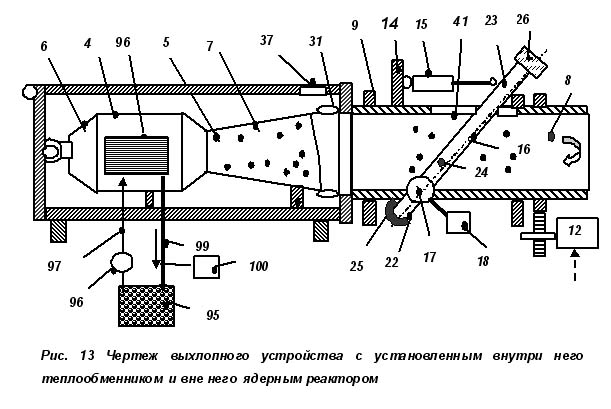
. Возможен вариант исполнения боевого лазера с ядерным реактором 95, и теплообменником 96, установленным внутри сопла 6 или выхлопного устройства 8 (фиг.11) Ядерный реактор 95 и теплообменник 96 соединены трубопроводами циркуляции теплоносителя подводящем 97 и отводящем 98, в одном из которых установлен насос теплоносителя 99 с приводом 100. В отводящем трубопроводе установлен датчик температуры 101, позволяющий одновременно контролировать работу ядерного реактора 95 и системы рециркуляции теплоносителя.
Пневмогидравлическая схема ЖРД 4 приведена на рис. 12.
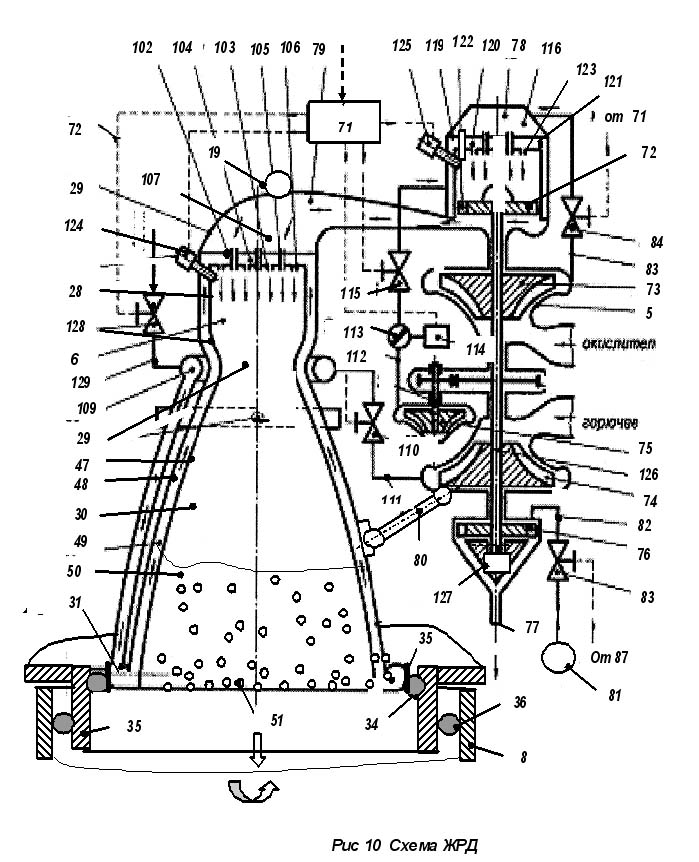
Внутри камеры сгорания 6 (рис. 10) выполнены наружная плита 102 и внутренняя плита 103 с зазором (полостью) между ними 104. Внутри головки 27 камеры сгорания 6 установлены форсунки окислителя 105 и форсунки горючего 106. Форсунки окислителя 105 сообщают полость 107 с внутренней полостью 108 камеры сгорания 6. На наружной поверхности камеры сгорания 6 установлен коллектор горючего 31.
К коллектору горючего 31 подключен патрубок 109, на котором установлен клапан горючего 110, вход которого трубопровоом горючего 111 соединен с выходом насоса горючего 74. Выход из дополнительного насоса горючего 75 соединен топливопроводом высокого давления 112, содержащим регулятор расхода 113 с приводом 114 и клапан высокого давления 115 — с газогенератором 78, конкретно с его полостью 116
Выход из насоса окислителя 75 трубопроводом окислителя 117 через клапан окислителя 118 соединен с газогенератором 78.
Газогенератор 78 имеет внешнюю и внутреннюю плиты соответственно 119 и 120 с полостью между ними 121 и форсунки окислители и горючего, соответственно – 122 и 123.. На головке 27 камеры сгорания 6 установлены запальные устройства 124, а на газогенераторе 78 – запальные устройства 125 (фиг.10).
ТНА 5 имеет установленный на валу 126 датчик частоты вращения 127. К датчику частоты вращения 127 подсоединена электрическая связь 88, которая соединена с бортовым компьютером 87.
К бортовому компьютеру 87 электрическими связями 88 подключены запальные устройства 124 и 125 предпочтительно электрозапальные, клапан горючего 110, клапан окислителя 118, привод 114 регулятора расхода 113, клапан высокого давления 115,
К коллектору горючего 31 подключен продувочный трубопровод 128 с клапаном продувки 129.
Возможны различные варианты исполнения конструкции боевого лазера; стационарный, мобильный на многоколесном шасси без двигателя (прицеп), мобильный на многоколесном шасси с ДВС или дизельным двигателем и на гусеничной ходовой части. Далее подробно описан только последний вариант (рис. 14). В этом варианте боевой лазер имеет гусеничную ходовую часть 130, двигательный отсек 131, левый тяговый электродвигатель 132, правый тяговый электродвигатель 133, соединенные силовыми кабелями 85 с коммутатором 86.
Боевой лазер в этом варианте содержит топливный отсек 134, содержащий, в свою очередь, емкость горючего 135, заправочную горловину горючего 136, трубопровод горючего 137, расходомер горючего 138 и кран горючего139. Кроме того, он содержит емкость окислителя 140, заправочную горловигу окислителя 141, трубопровод окислителя 142, расходомер окислителя 143 и кран окислителя 144.
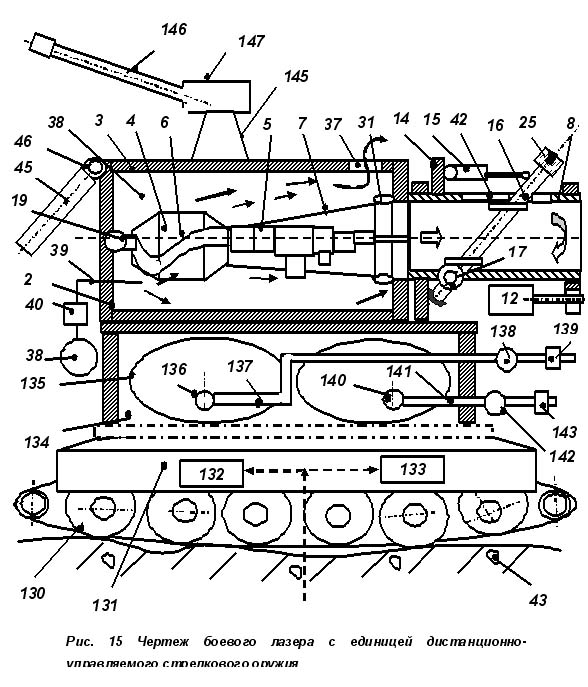
Над боевым лазером может быть на опоре 145, (рис. 15) установлена по меньшей мере одна единица дистанционно-управляемого стрелкового оружия 146 с системой дистанционного управления 147. Единица дистанционно-упроавляемого стрелкового оружия 146 предназначена для обороны мобильного боевого лазера на марше и при израсходовании окислителя и горючего.
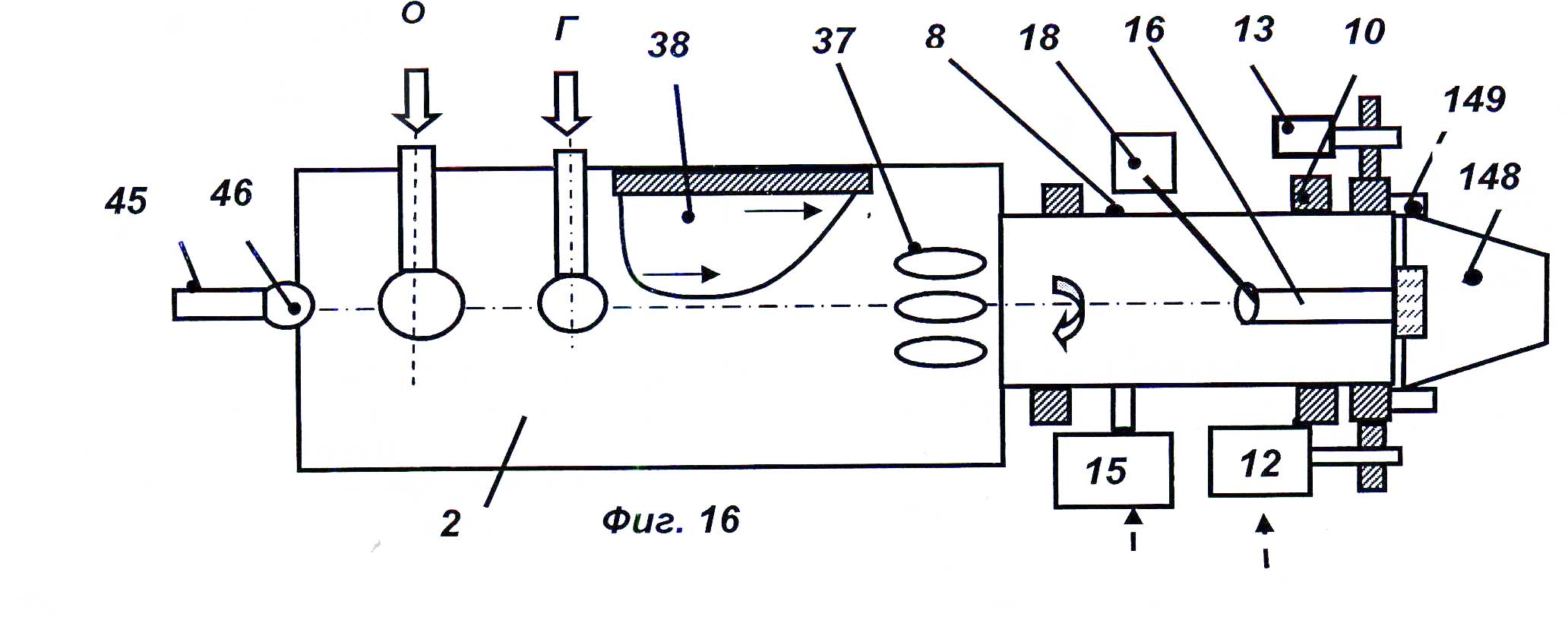
На фиг. 16 приведен боевой лазер с диффузором 148 установленным при помощи кронштейнов 149 на бронекорпусе 3.
БОЕВОЕ ПРИМЕНЕНИЕ: БОЕВОГО ЛАЗЕРА
Боевой лазер спроектирован только для обороны участка неба в радиусе прямой видимости со стороны боевого лазера и практически без ограничения по высоте. Горизонтальное расположение ЖРД 4 уменьшает габариты боевого лазера по высоте, а применение анкерных болтов 44 и реактивного упора 45 с шарниром 46 исключает влияние реактивной тяги .ЖРД 4 на точность стрельбы (рис 1…16).
При запуске боевого лазера сначала запускают жидкостный ракетный двигатель 4, потом ядерный реактор 95 при его наличии. Для запуска ЖРД 4 открывают клапан 83 и сжатый воздух по трубопроводу высокого давления 82 поступает в пусковую турбину 76. Потом открывают клапаны 110, 115 и 118 и включают запальники 124 и 125 (рис. 10). Топливо (окислитель и горючее) при сгорании в камере сгорания 27 сгорает при относительно низкой температуре до 500 град. С. Дальнейший подогрев продуктов сгорания до 3 000 …4 000 град. С осуществляется ядерным реактором 95. Кроме значительного нагрева продукты сгорания подвергаются радиоактивному облучению, это способствует повышению мощности лазера.
Управление боевым лазером выполняет бортовой компьютер 87 при помощи приводов 13 и 15 (фиг. 1) поворачивающих резонатор 16 в двух плоскостях.
Выключение боевого лазера осуществляется в обратном порядке.
Боевой лазер практически мгновенно вступает в бой и поражает цели лучами боевого лазера, используя для наведения собственные координаты и координаты цели, полученные с командного пункта – КП или радиолокационной станции – РЛС (КП иРЛС н6а рис. 1…16 не показаны). до полного израсходования окислителя и горючего, после чего ее устанавливают таким образом, что к ее сбоку размещают заправщики окислителя и горючего своим задним торцом, затем производят заправку окислителем и горючим боевой машины, а после этого она производит повторную атаку, а заправщики окислителя и горючего сразу направляют за компонентами ракетного топлива (окислителем и горючим) для продолжения боя..
Поэтому данное техническое решение отвечает критерию «новизна». Для определения соответствия предлагаемого изобретения критерию «изобретательский уровень» проведен анализ признаков выявленных аналогов. Учитывая, что предлагаемое техническое решение обладает новой совокупностью признаков, которые для специалиста явным образом не следуют из существующего уровня техники, оно соответствует критерию «изобретательский уровень». Предлагаемый способ повышения боевой эффективности стрельбы позволяет обеспечить:
— автономную топопривязку и навигацию, что позволяет вести стрельбу с неподготовленной в топогеодезическом отношении огневой позиции, наведение пакета направляющих пусковой установки без выхода расчета из кабины боевой машины и без использования точки наводки;
— одновременную стрельбу одним или несколькими лучами сверхмощного лазера,
— заправку окислителем и горючим боевого лазера с помощью заправщиков в любой последовательности;
— максимальную скорость движения комплекса по дорогам с твердым покрытием порядка 100 км/час;
— проходимость по снегу, болоту и пескам пустыни,
— запас хода по топливу — 2000 км;
— количество лучей лазера – 1…40 шт,
— полное время перезаправки — до 10 мин.
Стационарный боевой лазер вступает в бой практически мгновенно.
По прибытии на боевую позицию мобильный боевой лазер вступает в бой. через несколько секунд. При израсходовании мобильным боевым лазером всего окислителя и горючего его заправляют окислителем и горючим при помощи заправщиков (заправщики на фиг. 1…16 не показаны).. После отхода заправщиков на безопасное расстояние боевой лазер производит необходимую стрельбу лазером по атакуемой цели. После заправки боевого лазера заправщики направляются за очередной порцией окислителя и горючего и так до окончания боевых действий. Боевые действия боевой лазер ведет без участия человека в связи с гибельным действием звукового потока работающего ЖРД на экипаж и все живое в радиусе до 1000 м и высоким радиационным фоном в случае использования ядерного реактора.
Применение изобретения позволит:
Повысить дальность стрельбы лучами лазера, особенно в высоту до уровня космических высот.
Повысить поражающую мощь установки в 500…1000 раз.
Обеспечить надежную и полную автоматизацию процесса перезаправки пусковой установки окислителем и горючим.
Улучшить неуязвимость боевого комплекса за счет мощного бронирования и применения дистанционно-управляемого стрелкового оружия.
Сделать ресурс стрельбы до капитального ремонта безграничным и ресурс ходовой части равным ресурсу танка или САУ на базе ходовой части которой изготовлена боевая машина.
Предлагаемый способ повышенной боевой эффективности стрельбы одновременно несколькими лучами лазера (от 1 до 40 лазерных лучей мощностью от 10 Мвт до 200 Мвт каждый) позволяет поражать:
— самолеты и ракеты противника в радиусе прямой видимости,
— спутники на орбите,
-космические бомбардировщики,
— головные части ракет на баллистической траектории.
Основной отличительной способностью предложенного боевого комплекса является наличие не одного, а нескольких резонаторов, а отличие способа ведения боя, заключается в том, что при ведении оборонительного боя может быть задействован один или несколько лучей лазера. Естественно, если применяется только один луч лазера, его мощность возрастает. Также бой может вестись с применением ядерного реактора, это не только повысит мощность лазерных лучей, но и на порядок увеличит время активного использования лазера без перезаправки.
Боевой лазер может работать без экипажа с использованием систем Глонасс и радиоуправления. В исключительных случаях экипаж может использоваться для перемещения боевого лазера и его обороны от десанта противника. В случае использования ядерного реактора 95 (естественно только при неработающем ядерном реакторе 95), допустимо только кратковременное пребывание около ЖРД 4 обслуживающего персонала в специальных защитных скафандрах. Заправщики имеют экипаж по 2 или 3 человека для управления движением, подстыковки и отстыковки шлангов и обороны. Но в случае гибели всего экипажа заправщики способны автономно вести бой с использованием стрелкового оружия и перемещаться с применением радиоуправления, принимая максимально возможные меры для спасения материальной части и после смены экипажа для дальнейшего выполнения поставленных задач.
Имея такой патент на изобретение, предприятиям России, изготавливающим такие комплексы, кроме обеспечения обороноспособности страны, будет значительно легче продавать их за рубеж союзникам и дружественным странам, одновременно можно повысить цену реализации единицы продукции в 5…10 раз, при более низкой себестоимости., так как включение подобного устройства и способа в техническую и рекламную документацию сразу даст отражение в ней повышенной боевой эффективности стрельбы этими продаваемыми комплексами и их абсолютную неуязвимость. При этом можно быстро и легко наладить серийное производство этого нового вида оружия, учитывая передовые позиции СССР в танкостроении и огромное количество танков, произведенных в СССР и РФ. При этом доходы нашего государства от экспорта оружия возрастут в десятки и сотни раз.
Литература:
1. Конюхов В. К., Прохоров A. M., Второе начало термодинамики и квантовые генераторы с тепловым возбуждением, «УФН», 1976, т. 119, с. 541;
2. Лосев С. А., Газодинамические лазеры, M., 1977; Андерсон Д., Газодинамические лазеры: введение, пер. с англ., M., 1979;
3. Бирюков А. С., Щеглов В. А., Газовые лазеры на каскадных переходах линейных трехатомных молекул, «Квантовая электроника», 1981, т. 8, с. 2371;
4. Карлов H. В., Лекции по квантовой электронике, M., 1983. А. С. Бирюков
Автор статьи: Патентный поверенный Рф Болотин Николай Борисович


